>>12390
"Can you think of an actuator design that works on the principles you are promoting, rather than the more mundane (and slower/noisier) screw-type design?"
looking at
>>12390
I'm not sure I understand your comment "dime thin actuators", could the thin part be that of a tube being a dime thick???
Well anyways I think you can build the whole torso with a backbone made of sockets and balls, then have three strings . One in the back , and two on the sides towards the front.
I made a drawing. Damn it no grief over this. I did it online with a track ball. I started it and it went ok but somehow the "mode" got stuck on some bizarre mode that I couldn't get out of that made it where I couldn't use the pencil. So I didn't really finish but I think I can explain it.
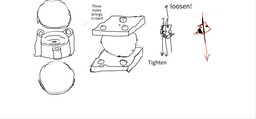
First drawing on left.
See there's a ball and two sockets. Just one section of a backbone. You see the holes in the front and the one hole in the back. Strings will go through these vertically all the way up the backbone.
Second drawing moving to the right. I show it with just plates to simplify for the next two drawing, but it's the exact same thing as the first.
The third drawing
I show pulling on the front two strings and loosening the tension on the one in the back. This makes the torso lean to the front or towards you as you look at the picture. You can see the "pitifully" drawn strings and arrows showing them pulling.
Now moving to the right you see a half drawn even worse drawing(this is where the "mode" got stuck in some odd ass brush that I could not get it to undo) anyways, this time the string on the front right is pulled down and all the tension is released on the left and half the tension on the back. This makes the backbone articulate towards the right as you are looking at it. I couldn't draw all the strings because..well it screwed up on me so you will just have to imagine them.
Basically we have a socket with three directions that can be tensioned so that it can move in any direction, front, back, or either side.
Now all you need to operate this is three motors with string tied to pulleys on them that take up slack on the strings by rolling up or unrolling string depending on which way they need to go. The other end of the string is fixed to the top vertebra and the pulleys are on the bottom in this case in the hip.
So the whole torso is three motors.
Alright let's extend this to the whole body but neglect fingers and toes. Only hands and feet. So we need three motors for each major limb, head, torso, I get 14 for the whole body so 14 x 3 motors each gives you 42 motors for the whole body.
For the hands and feet if you have one thumb or toe and two fingers you could probably manipulate whatever you wanted so that's another 3 x 4 for hands and feet, 12 added so 3 x 12=36 motors.
Now this would work fine but look a little retarded as every single motion would be an arch. So the spine would be round when it articulated.
I have a bit of a kludge idea how to make it look natural and only use three motors for each finger and each toe.
At each joint of the finger have a solenoid that pulls a wedge down on the rope so that it stops. This means you could pull the finger in a little then stop it pulling the top or end of the finger but it would still pull close the hand with the next joint down.
Like I said it's a kludge and I don't like it but it is cheap and would work but it only saves you one transistor and we already see that these are super cheap.
It's going to be tough to find motors with the power we need without using the dreaded gears.
I looked briefly at DC motors on ebay just to get some numbers. I found a $12.00 motor with these specs
DC 36V, current 0.20A, speed 9000RPM
Now I "think" we can use Watts as a short hand for force. I mean an instantaneous force. Like how much someone could pick up and hold in place.
(I may be getting this wrong but I think it's right)
The actual force would be in Newtons. It says about watts that
"...When an object's velocity is held constant at one meter per second against a constant opposing force of one newton, the rate at which work is done is one watt..."
Now here's the problem. This definition above I read as you are accelerating at one meter per second against one Newton of force. Now what we want is not acceleration but the actual force that we can pick up and hold. Not acceleration. Yet when you look up "instantaneous force it says,"Power is given as the rate of doing work. In an electrical circuit, the amount of electrical energy dissipated by the load is known as Electrical Power. In an AC circuit, the instantaneous power is given by the product of an instantaneous voltage across the load and the instantaneous current passing through it. "(that's watts but I don;t know how to translate that straight to force to pick up something.)
Here's the problem we're looking for pound-force which is directly related to Newtons at a rate of 1N=0.2248089 pound force and one watt is equal to one N but they give it as accelerating.
I think as a rough guide we can use the newton to pond force and just call whatever Newtons needed watts but I'm not at all sure about this.
How they can call Watts an instantaneous force yet elsewhere call it not is confusing me and it will have to be resolved. We need to be able to use watts as a reference on how much weight a waifu actuator can move.
https://en.wikipedia.org/wiki/Newton_(unit)
https://en.wikipedia.org/wiki/Watt
and yes I do understand watts are based on force and time but I'm trying to take out the acceleration.
I'm not explaining this well. If you go to this site and type in Newtins to directly get an equal force or weight in pound force
https://duckduckgo.com/?q=newton&t=ffcm&ia=answer
it's clear but then when trying to equal that to watts you can not directly do so.
I'm supposed to know this but I don't. Someone please explain how to get a pound force using watts as a reference unit.