
R: 29 / I: 7 /
P: 1
Lurk Less: Tasks to Tackle
Here we share the ideas of how to help the development of robowaifus. You can look for tasks to improve the board, or ones which would help to move the development forward. You could also come up with a task that needs to be worked on and ask for help, use the pattern on top of OP for that, replace the part in <brackets> with your own text and post it.
>Pattern to copy and adjust for adding a task to the thread:
Task: <Description, general or very specific and target thread for the results>
Tips: <Link additional information and add tips of how to achieve it.>
Constraints and preferences: <Things to avoid>
Results: Post your results in the prototypes thread if you designed something
>>18800, or into an on-topic thread from the catalog if you found something or created a summary or diagram.
General Disclaimer: Don't discuss your work on tasks in this thread, make a posting in another thread, or several of them, and then another one here linking to it. We do have a thread for prototypes
>>18800, current meta
>>18173 and many others in the catalog
https://alogs.space/robowaifu/catalog.html - the thread for posting the result might also be the best place to discuss things.
>General suggestions where you might be able to help:
- Go through threads in the catalog here
https://alogs.space/robowaifu/catalog.html and make summaries and diagrams like pointed out starting here
>>10428
- Work on parts instead of trying to develop and build a whole robowaifu
- Work on processes you find in some thread in the catalog
https://alogs.space/robowaifu/catalog.html
- Test existing mechanisms shared on this board, prototypes
>>18800
- Try to work on sensors in some kind of rubber skin and in parts
>>95 >>242 >>419
- Keep track of other sites and similar projects, for example on YouTube, Twitter or Hackaday.
- Copy useful pieces of information from threads on other sites and boards talking about "sexbots", "chatbots", AI or something similar. Pick the right thread here:
https://alogs.space/robowaifu/catalog.html
- Search for interesting parts on Thingiverse and similar sites: Skeletons, BJD dolls, ... Search first if something has been mentioned already, put similar projects into one posting. First, find the right place in the catalog before posting:
https://alogs.space/robowaifu/catalog.html
- Software is more security critical, we need ways to verify your project isn't harmful if we use it.
- Recruit anons for our efforts on other sites, especially in threads or subreddits with similar topics, or topics like MGTOW, BlackPill, anti-feminism, (DIY-)"sexdolls", Chatbots, ... recruit/evangelize/advocate e.g. with memes and banners
>>2705
- Preparing pictures for the creation of memes or banners (remove background or text)
>>2705
- Go through old meta and the project threads and crosslink posting to more topic specific threads according to the topic
>>18173 >>15434 >>12974 >>8492 >>3108 >>38
- Write down topics discussed anywhere on this board, use these as search terms in Waifusearch
>>8678 (after installing it), and post the result in the Archive thread
>>7143
- Look for things we don't know, but should know.
- Find things you think need to be done and and add tasks yourself, using the pattern above.
> General Recommendations:
- Try to post results into the right thread (NOT here in this thread)
- Try mostly not just use google and don't just post some links as answers
- Dont try to lead us, or to centralize us, or to move all of us to another platform
- The catalog with all the threads is also hotlinked at the top & bottom of this board. You can use every thread to post, there's no advantage posting everything into the most active ones. Maybe look at the end of a thread if there's a follow up thread. Don't worry if you post it in the wrong place, volunteers will move it if necessary.
>===
-
add/rm temp appeal for help
R: 1 / I: 0 /
P: 1
Welcome to /robowaifu/
Why Robowaifu?
Men's mental health regarding the sexes has been rapidly-deteriorating today, and men around the world have been looking for a solution. History shows there are cultural and political solutions to this general problem's causes, but we believe that technology is the best way forward at present – specifically the technology of robotics. We are technologists, dreamers, hobbyists, geeks
and robots looking forward to a day when any man can build the ideal companion he desires in his own home. However, not content to wait for the future; we are bringing that day forward. We are creating an active hobbyist scene of builders, programmers, musicians, artists, designers, and writers using the technology of today, not tomorrow. Join us!
>tl;dr
This is a place for men who want to live peacefully with beautiful feminine robowaifus. Simple as.
<--->
NOTES & FRIENDS
> Notes:
-
This is generally a SFW board, given our engineering focus primarily. On-topic NSFW content is OK, but please spoiler it.
-
Our bunker is located at: https://trashchan.xyz/robowaifu/catalog.html Please make note of it.
-
Webring's mustering point:
https://junkuchan.org/shelter/index.html
-
Library thread (good for locating terms/topics) (
>>7143)
> Friends:
-/clang/ - currently at
https://8kun.top/clang/ - toaster-love NSFW. Metal clanging noises in the night.
-/monster/ - currently at
https://smuglo.li/monster/ - bizarre NSFW. Respect the robot.
-/tech/ - currently at
>>>/tech/ - installing Gentoo? They'll fix you up.
-/britfeel/ - currently at
https://trashchan.xyz/britfeel/ - some good lads. Go share a pint!
-/server/ - currently at
https://trashchan.xyz/server/ - multi-board board. Eclectic thing of beauty.
-/f/ - currently at
https://trashchan.xyz/f/res/4.html#4 - doing
flashtech old-school.
-/kind/ - currently at
https://wapchan.org/kind - be excellent to each other.
-/comfy/ - currently at
https://trashchan.xyz/comfy/ - we can have all the nice things!
-/cute/ - currently at
https://smuglo.li/cute/ - moe overload all day, erry day. Just don't fight it, Anon.
-/kong/ - currently at
>>>/kong/ - vidya talk NSFW. Do you just wanna play video games Anon?
-/late/ - currently at
https://trashchan.xyz/late/ - night time, best time.
-/agdg/ - currently at
https://trashchan.xyz/agdg/ - just like, make game.
-/retro/ - currently at
https://trashchan.xyz/retro/ - alway rember; turn your computer off before midnight on 12/31/1999, Anon!
-/mlpol/ - currently at
https://mlpol.net/ - pony, pony, pony and pony.
-Robowaifu Institute of Technology - currently at
https://robowaifu.tech/ - all the robowaifu science, all the time.
What is a Robowaifu?
That's a very good question! A robowaifu is a robot that fulfills a man's natural need for companionship. To achieve this, there are many problems to be solved, and there are many approaches being explored here. Solutions range from silicone sex dolls with robotic features to VR and virtual girlfriends.
Do You Intend to Sell Robowaifus?
The objective is to design a robowaifu that any man can create in his own home. We also believe in open source as a way to protect our rights. We expect that some day companies will sell robowaifu kits. Already there is one company that sells a complete robowaifu, that company being RealDoll, the robowaifu being named Harmony.
What do You Think About RealDoll's Harmony?
RealDoll is a company that sells highly realistic silicone sex dolls. Recently, they have started selling what we would call a robowaifu, named Harmony. This is the first robowaifu to come to market. We wish them well, but most on this board have objections to the approach. Firstly, she is expensive, costing about $10,000, out of range for most men. Secondly, she is deep into the uncanny valley, the place where human-imitating technologies go to die. Thirdly, the range of designs are quite limited, and every man has a different ideal woman.
To avoid dealing with the uncanny valley and for other reasons, we believe that a customizable, neotenous, non-realistic (possibly animal-like) alternative is in order. We believe that robowaifus can be made cheaper and more available. And we believe that a DIY hobbyist scene would be more resistant to threats such as corporate surveillance, angry feminists with the government's ear, and traditionalist morality police looking for an easy victory.
How Much Would a Kit Cost?
It's unclear at the moment. RealDoll's Harmony is $10,000, which is out of range for most men. On the other hand, a robotic pet such as a Furby costs $40. Therefore, robowaifus will range between $40 and $10,000. Unless you have a Furby-fetish, you're unlikely to get anything satisfying for less than $300, and a kit is unlikely to be economically successful for over $2,000. Therefore, a DIY robowaifu will probably range between $300 and $2,000.
How Customizable Will Robowaifus be?
Open source designs will enable unlimited customization. To some extent you will be limited by your own artistic talent, although men without art skills should be able to find a wide variety of premade designs to meet their needs. We have seen the ability of the internet to fulfill all sorts of crazy niches and fetishes, so don't expect anyone to be disappointed – except roasties!
Who can Contribute?
We need a variety of talents. Obviously engineers and programmers, but also artists, designers, and even writers. And of course literally anyone can freely voice their opinions here, so please join in.
Conduct on /robowaifu/
-
First, the three basic
rules of the board
>1 : Spoiler NSFW content
>2 : Don't promote either feminism or literal faggotry outside of The Basement Lounge
>3 : Don't promote weaponry. Explicitly non-violent concepts derived from weaponry may be acceptable.
https://alogs.space/robowaifu/rules.html
-
Second, a

R: 58 / I: 10 /
P: 1
LLM & Chatbot General v2
Textual/Multimodal LLM & Chatbot General v2
Models: huggingface.co/
>How to bulk-download AI models from huggingface.co? ( >>25962, >>25986 )
Speech
>>199
Vision
>>97
Previous thread
>>250
Looking for something "politically-incorrect" in a smol, offline model? Well Anon has just the thing for you
>>38721
Lemon Cookie Project
>>37980
Non-LLM chatbots
>>35589
R: 331 / I: 49 /
P: 1
/robowaifu/-meta-13: On the Silver Screen
/meta, offtopic, & QTDDTOT
<---
Mini-FAQ
A few hand-picked posts on various /robowaifu/-related topics:
--->
Lurk less: Tasks to Tackle (
>>20037 )
--->
Why is keeping mass (weight) low so important? (
>>4313 )
--->
Why shouldn't we use Cloud AI? (
>>38090,
>>22630,
>>30049,
>>30051 )
--->
How to get started with AI/ML for beginners (
>>18306 )
--->
"The Big 4" things we need to solve here (
>>15182 )
--->
HOW TO SOLVE IT (
>>4143 )
--->
Why we exist on an imageboard, and not some other forum platform (
>>15638,
>>31158 )
--->
This is madness! You can't possibly succeed, so why even bother? (
>>20208,
>>23969 )
--->
All AI programming is done in Python. So why are you using C & C++ here? (
>>21057,
>>21091,
>>27167,
>>29994 )
--->
How to learn to program in C++ for robowaifus? (
>>18749,
>>19777,
>>37647 )
--->
How to bulk-download AI models from huggingface.co ? (
>>25962,
>>25986 )
--->
Why do you talk about feminism here? How are robowaifus related? (
>>27124,
>>1061 )
--->
Why should/shouldn't I do this; what's in it for me? (
>>33755 )
--->
Why it's important to K.I.S.S. with your robowaifus (
>>35264,
>>35271 )
--->
What is Neuromorphics? Why will it be important to robowaifus in the future? (
>>42111,
>>12828,
>>12861 )
--->
This stuff is really complicated: let's all stick together & be patient! (
>>35571 )
<---
-Library thread (good for locating terms/topics)
(
>>7143 )
--> note: There's a simple searching tool coded right here for /robowaifu/ that provides crosslinks straight to posts on the board. It's named Waifusearch, and the link to the latest code should always be maintained within the Library thread's OP & also on the current /meta.
---> Latest version of Waifusearch v0.2a
(
>>8678 )
---> Latest version of /robowaifu/ JSON archives v221213
Dec 2022
https://files.catbox.moe/6rhjl8.7z
if you use Waifusearch, just extract these JSON files into your 'all_jsons' directory for the program, then quit (q) and restart.
--->note: There's an archiving tool coded right here for /robowaifu/ that provides the ability to backup locally the posts & files from our board. It's named BUMP, and is basically a custom IB scraper.
Latest version of BUMP v0.2g (
>>14866 )
<---
>note: There's a design document for the specification of general design and engineering choices for our basic Robowaifu Reference Model A Series (TBD). Please have a look at it, and collaborate together with us on it ITT Anon.
-Robowaifu Design Document
(
>>3001 )
<---
>useful external resources
wAIfu-collective's AI guide -
https://rentry.org/waifu-diy-ai
<---
Previous meta threads:
(
>>38 )
(
>>3108 )
(
>>8492 )
(
>>12974 )
(
>>15434 )
(
>>18173 )
(
>>20356 )
(
>>23415 )
(
>>26137 )
(
>>32767 )
(
>>37898 )
(
>>41241 )

R: 320 / I: 179 /
P: 1
My Advanced Realistic Humanoid Robot Project - Eve
So far I have plans to build Adam, Eve, and Abel robots. All of these are Bible characters. This thread will cover the Eve robot.
Eve will have no "love holes" because adding those would be sinful and evil. It is a robot, not a biological woman after all and I will view her with all purity of heart and mind instead of using her to fulfill my lusts of my body. Instead I will walk by the Spirit no longer fulfilling the lusts of the flesh as the Bible commands.
Eve will be beautiful because making her beautiful is not a sinful thing to do. However, I will dress her modestly as God commands of all women everywhere. This would obviously include robot women because otherwise the robot woman would be a stumbling block to men which could cause them to lust after her which would be a sin. To tempt someone to sin is not loving and is evil and so my robot will not do this. To dress her in a miniskirt, for example, would be sinful and evil and all people who engage in sinfullness knowingly are presently on their way to hell. I don't wish this for anyone. My robot will dress in a way that is a good example to all women and is aimed toward not causing anybody to lust as a goal.
My robot will have a human bone structure. It will use either a PVC medical skeleton or fiberglass fabricated hollow bones.
My robot will look realistic and move realistic. It will be able to talk, walk, run, do chores, play sports, dance, rock climb, and do gymnastics. It will also be able to build more robots just like itself and manufacture other products and inventions. I realized with just a head and arm, a robot can build the rest of its own body so that is my intention.
My robot will use BLDC motors for drones, RC, and scooters that are high speed and low-ish torque but I will downgear those motors with a archimedes pulley system that will be custom made from custom fabricated pulleys that will be bearings based. By downgearing with pulleys, instead of gears, I will cut down the noise the robot makes so it will be as silent as possible for indoor use. By downgearing, I convert the high speed motors into moderate speeds with great torque. BLDC motors with large torque generally are too large in diameter for a human form factor and take up too much volumetric area to be useful which is why I go with the high speed smaller diameter type motors but just heavily downgear them 32:1 and 64:1.
My robot will have realistic silicone skin. Thom Floutz -LA based painter, sculptor, make-up artist is my inspiration as it pertains to realistic skin. The skin for my robots has to be at his level to be acceptable. It must be nearly impossible to tell the robot is not human to be acceptable. I will have a wireframe mesh exoskeleton that simulates the volumes and movements of muscle underneath the skin which will give the skin its volumetric form like muscles do. Within these hollow wireframe mesh frameworks will be all the electronics and their cooling systems.
All of my motor controllers will be custom made since I need them VERY small to fit into the confined spaces I have to work with.
I need LOADS of motors to replace every pertinent muscle of the human body in such a way that the robot can move in all the ways humans move and have near human level of strength and speed.
I will have a onboard mini itx gaming pc as the main brains pc of the robot and will have arduino megas as the motor controllers and sensor reading devices that interface with the main brains pc. My arduino megas will be barebones to keep the volumetric area they take up as small as possible.
I will treat my robots kindly and consider them to be pretend friends/companions and I do think they will be nice company, but I will always know with keen awareness that they do not have a soul, will never have a soul or consciousness, and no machine ever will, and that they are just imitations of life as with any machine or AI, and this is all AI will ever be. Life is only made by God Himself. I am not playing God. I am merely creating fan art of what God made. To Him be all the glory and praise. God breathed into man and created a living soul. Man cannot do this for machines. Only God can do this. A soul/spirit forms our ghost and when we die our ghost remains alive and thinking. A machine cannot do this and a AI can never do this. When you shut off a machine that's it, it does not go on thinking like we can. Our souls are transcendent and will live forever in the afterlife - unlike any AI. I will do this project with fear and trembling before the Lord as I work out my salvation before His eyes. I vow to remain pure, holy, upright and blameless in all my doings and be a great example to my fellow roboticists of a Godly man who obeys the Bible instead of chasing after youthful lusts of the flesh and perversions.
I embrace the idea of Christian AI, that is, a robot that will discuss Bible topics and be a Biblical expert. Along with that, my robot will behave in a Biblically prescribed manner in total purity and strongly encourage others to do so as well. For God does not hear the prayers of sinners and so we want everyone to be a saint who no longer sins. My robot will really push for this hope for humans. We want them to walk in God's favor and blessings which comes by Biblical obedience. We don't want them going to hell because they chose to revel in their sins instead of walking in total purity before God and holiness without which no man will see God.
My robot will have artificial lungs for cooling and a artificial heart for liquid cooling that will run coolant throughout the robot's body to cool the motors. That coolant will also pass through the artificial lungs in a mesh where it will evaporate some which will cause the evaporative cooling effect - a form of air conditioning.
http://www.artbyrobot.com
Full humanoid robot building playlist:
https://www.youtube.com/playlist?list=PLhd7_i6zzT5-MbwGz2gMv6RJy5FIW_lfn
https://www.facebook.com/artbyrobot
http://www.twitch.tv/artbyrobot
https://instagram.com/artbyrobot
R: 147 / I: 56 /
P: 1
Galatea v3 Series: Maid Robot
For the past year, I have been working on my own robowaifu design. Her name is Galatea. She's currently in the v3 Series. The design is very easy to build with the instructions and files, and is relatively very cheap, around $400 to make. She's also very customizable, you can choose the color, dress, hair, and even AI.
I intend this to be the Model T of humanoid robots and robotic companions, while it is not the most complex, it is easy to mass produce and cheap.
As of this post, her latest version is v3.0.2
Previous thread:
https://trashchan.xyz/robowaifu/thread/74.html
R: 308 / I: 158 /
P: 1
DCC Design Tools & Training
Creating robowaifus requires lots and lots of design and artistry. It's not all just nerd stuff you know Anon! :^)
ITT: Add any techniques, tips, tricks, or content links for any
Digital Content Creation (
DCC) tools and training to use when making robowaifus.
>note: This isn't the 'Post Your Robowaifu-related OC Arts & Designs General' thread. We'll make one of those later perhaps.
>---
I spent some time playing with the program Makehuman and I'll say I wasn't impressed. It's not possible to make anime real using Makehuman, in fact the options (for example eye size) are somewhat limited. But there's good news, don't worry!
The creator of Makehuman went on to create a blender plugin called ManuelBastioniLAB which is much better (and has a much more humorous name). The plugin is easy to install and use (especially if you have a little blender experience). There are three different anime female defaults that are all pretty cute. (Pictured is a slightly modified Anime Female 2.) There are sliders to modify everything from finger length to eye position to boob size. It even has a posable skeleton. Unfortunately the anime models don't have inverse kinematic skeletons which are much easier to pose. Going forward I'm probably going to use
MasturBationLABManuelBastioniLAB as the starting point for my designs.
---
Saving everything with yt-dlp (
>>16357,
>>12247)
>===
-
re-purpose OP for DCC consolidation
-
add yt-dlp crosslink
R: 118 / I: 41 /
P: 1
Hand Development
Since we have no thread for hands, I'm now opening one. Aside the AI, it might be the most difficult thing to achieve. For now, we could at least collect and discuss some ideas about it.
There's Will Cogleys channel:
https://www.youtube.com/c/WillCogley - he's on his way to build a motor driven biomimetic hand. It's for humans eventually, so not much space for sensors right now, which can't be wired to humans anyways. He knows a lot about hands and we might be able to learn from it, and build something (even much smaller) for our waifus.
Redesign:
https://youtu.be/-zqZ-izx-7w
More:
https://youtu.be/3pmj-ESVuoU
Finger prototype:
https://youtu.be/MxbX9iKGd6w
CMC joint:
https://youtu.be/DqGq5mnd_n4
I think the thread about sensoric skin
>>242 is closely related to this topic, because it will be difficult to build a hand which also has good sensory input. We'll have to come up with some very small GelSight-like sensors.
F3 hand (pneumatic)
https://youtu.be/JPTnVLJH4SY
https://youtu.be/j_8Pvzj-HdQ
Festo hand (pneumatic)
https://youtu.be/5e0F14IRxVc
Thread
>>417 is about Prosthetics, especially Open Prosthetics. This can be relevant to some degree. However, the constraints are different. We might have more space in the forearms, but we want marvelous sensors in the hands and have to connect them to the body.
The thread about actuators is related:
>>406 and the discussion in R&D General starting here
>>1627 is a lot about artificial muscles.
My own concept in my mind for the most ambitious models so far is the following: We have no space to waste. We might try to use light canals and LEDs inside to indicate bending. We'll probably need to use PCBs for transport of current incl data while acting as part of the bone. We'll probably need connectors between the parts which transport current without bending cables, eg cylinders with layers out of different materials where some of them are conductive. We should try to use Will Cogleys files as foundation, but since we might want to only build the bones out of hard material we might need to do it in metal to go smaller. This metal might be something expensive, like Titanium. We'll need tools for fine mechanics and such skills. I also think air pressure might be usefull to help open the hands fast, of course in combo with strings. I haven't thought about the actuators in the forearms a lot, by now.
That's it for now, I'm really curious about the ideas for the premium models, but even more so for the cheap and then maybe even smaller waifus.
>===
-
minor sp edit
R: 335 / I: 95 /
P: 1
ITT: Anons derail the board into debate about Christianity :^)
I found this project and it looks interesting. Robots wives appeal to me because i'm convinced human woman and humans in general have flaws that make having close relationships with them a waste of energy. I'm a pathetic freshman engineering student who knows barely anything about anything. Honestly, I think current technology isn't at a place that could produce satisfying results for me at least. I'd like something better than an actual person, not a compromise. Even then the technology is there, I have my doubts it'll be affordable to make on your own. Fingers crossed though. Anyway, what kind of behavior would you like from your robot wife? I'd like mine to be unemotional, lacking in empathy, stoic and disinterested in personal gain or other people. I think human woman would be improved if they were like that. Sorry if this thread is inappropriate.

R: 432 / I: 135 /
P: 1
Philosophers interested in building an AGI?
Why is it that no philosophers are interested in building an AGI? we need to change this, or at least collect relevant philosophers. discussion about philosophy of making AGI (includes metaphysics, transcendental psychology, general philosophy of mind topics, etc!) also highly encouraged!
Ill start ^^! so the philosophers i know that take this stuff seriously:
Peter Wolfendale - the first Neo-Rationalist on the list. his main contribution here is computational Kantianism. just by the name you can tell that he believes Kant's transcendental psychology has some important applications to designing an artificial mind. an interesting view regarding this is that he thinks Kant actually employed a logic that was far ahead of his time (and you basically need a sophisticated type theory with sheaves to properly formalize). Other than that he also thinks Kant has interesting solutions to the frame problem, origin of concepts, and personhood.
CONTACTS: He has a blog at
https://deontologistics.co/, and also has posted some lectures on youtube like this one:
https://www.youtube.com/watch?v=EWDZyOWN4VA&ab_channel=deontologistics
Reza Negarestani - this is another Neo-Rationalist. he has written a huge work (which I haven't read yet ;_;) called "Intelligence and Spirit". It's massive and talks about various grades of general intelligence. this includes sentient agents, sapient agents, and Geist. this guy draws from Kant as well, but he also builds on Hegel's ideas too. his central thesis is that Hegel's Geist is basically a distributed intelligence. he also has an interesting metaphilosophy where he claims that the goal of philosophy is the construct an AGI. like other Neo-Rationalists, he heavily relies on the works of Sellars and Robert Brandom
Recc: Ray Brassier (recent focuses) - I dont think he is working on artificial general intelligence, but his work on Sellars, and in particular rule following is very insightful!
Hubert Dreyfus - Doesn't quite count, but he did try to bring Heidegger to AGI. He highlighted the importance of embodiment to the frame problem and common sense knowledge. I personally think Bergson might have explicated what he wanted to achieve but better, though that guy is like way before AI was even a serious topic, lol.
Murray Shanahan - This guy has done some extra work on the frame problem following Dreyfus. His solution is to use global workspace theory and parralel processing of different modules. Interesting stuff!
Barry Smith - Probably the most critical philosopher on this list. He talks about the requisite system dynamics for try strong AI, and concludes that our current methods simply don't cut it. One of the key stressing points he points out here with a colleague is that our current AI is Markovian when fleshed out chat dialogue would be a non-Markovian task (you can find the arxiv link of his criticism here:
https://arxiv.org/abs/1906.05833). He also has knowledge on analytic ontology (and amongst other thing has some lectures about emotion ontology). I think his main genius however is in coming up with a definition of intelligence that puts a lot of the problems with our current approaches into context (which can be found here:
https://www.youtube.com/watch?v=0giPMMoKR9s&ab_channel=BarrySmith)
CONTACTS: He has a yt channel here
https://www.youtube.com/watch?v=0giPMMoKR9s&ab_channel=BarrySmith
Uhh, that's the introduction of pretty much every philosopher I know who works on this stuff. I made a thread on /lit/ and got no responses :( (which isn't surprising since I am the only person I know who is really into this stuff)

R: 148 / I: 73 /
P: 2
Robowaifu Propaganda and Recruitment Thread 3: Now In 3D!
Attention artists, graphic designers, marketers, social media personalities, writers, and poasters! Your skills will be needed!
The task of building and designing a robowaifu is a herculean quest. As great as this community is, /robowaifu/ always needs more talent. We also need to spread the very idea of robowaifus to the masses. Luckily for us there are several communities on the internet that we could find new recruits or allies to help us build our waifus:
>MGTOW - These guys know all about the legal pitfalls of marriage and the dangers of feminism. There is already a lot of talk about sex robots in MGTOW communities. It shouldn't be a hard sell to get them to come here.
<However, some of these guys would rather spend all their time bitching on the internet about "MUH WOMENZ" than actually getting a hobby other than lifting heavy objects and putting them down again. MGTOW is literally Feminist Separatism for males.
>Incels - Guys that can't get laid. The opportunity for love and companionship should be enough to bring some of these guys over.
<However, we need to be careful when recruiting from some of their communities, since most of them are defeatists that balk at an actual solution, and they may be compromised by spies and derailers, both governmental and NGO/individual. We don't want to attract negative attention.
>Monster girls/nekomimi/HMOAF/mlpol - The only way these guys are going to be able to have their harpy/elf/goblin/anthro/pony/whatever gf is with a robowaifu. Many have an interest in seeing us succeed.
<However, there exists a very wide variety of communities under this umbrella, and there is a notable overlap between communities who would want robowaifus and communities that are morally compromised, such as furries, so care should be taken when looking into them. Romanticists and waifu enthusiasts have a tendency to congregate since they all want/create the same type of content, so looking for those subgroups would be the most efficient path.
>Otakus - Many men in these communities want to see their waifu/favorite character come to life, which will realistically only happen with robowaifus.
<However, many of those communities are drowning in the LGBT alphabet soup and Covid Tourists. Special care should be taken when looking into them.
>Male STEM students - Generally these guys aren't going to get laid until after they have established themselves. A robowaifu could really help them.
<However, this may be a harder sell because many of them have been brainwashed in university, but they have skills that we could really use.
>Transhumanists/biohackers - Many of the technologies involved in building a robowaifu could be used in transhumanist or biohacking applications such as building an avatar. They may have some interest in helping us out.
<However, we will need to be careful which transhumanist communities we go after as many of them are full of feminism, satanism, tumblr-tier sexualities and genders, and SJW's.
>Cyberpunks and technophiles - These guys (and they are usually guys) are all around into technology and may just enjoy working on the kinds of projects we need to do. They are often into programming and AI.
<However, many of these communities suffer from the same potential issues as transhumanists.
Original threads:
>>2705
>>36623
>===
-
minor subj edit
-
tmp lock thread 
R: 482 / I: 230 /
P: 2
SPUD Thread 2: Robowaifu Boogaloo
This first post is to show the 5 big milestones in the development of SPUD, the Specially Programmed UwU Droid. You can see the old thread here:
>>26306
The end goal of SPUD is to provide a fairly high-functioning robot platform at a relatively low cost (free code but a few bucks for 3d print files) that can be used for a variety of purposes such as promotional, educational or companionship. All AI used is hosted on local systems: no bowing to corporations any more than necessary, thank you.
Various aspects of the code are/will be modular, meaning that adding a new voice command/expression/animation will be easy as making the file, naming it and placing it in the correct folder (no need to mess around with the base code unless you REALLY want to).
While I'm researching more about bipedal walking I'll be making a companion for SPUD to ride on, so it might be a while before I return to the thread.

R: 42 / I: 8 /
P: 2
Robowaifus in Media: Thread 03
Post about whatever media predominately features at least one fembot aka gynoid (female form of an android) as an important character, ideally a robowaifu or synthetic girlfriend. Some freedom with the topic is allowed, virtual waifus or bodiless AI might also qualify if she is female. Negative framing of the whole topic should be mentioned with negative sentiment. Cyborgs with a human brain or uploads of women don't really fit in, but if she's very nice (Alita) and maybe not a human based cyborg (catborg/netoborg) we can let it slide. Magical dolls have also been included in the past, especially when the guy had to hand-made them.
Look through the old threads, it's worth it:
>>82 >>18711 - Picrel shows some of the more well know shows from a few years ago.
I made a long list with links to more info's on most known anime shows about fembots/robowaifus, without hentai but including some ecchi and posted it here in the old thread:
>>7008 - It also features some live-action shows and movies. I repost the updated list here, not claiming that it is complete, especially when it comes to live action and shows/movies we don't really like.
>In some cases I can only assume that the show includes robogirls, since the show is about various robots, but I haven't seen it yet.
A.D. Police Files:
https://www.anime-planet.com/anime/ad-police-files
Andromeda Stories:
https://www.anime-planet.com/anime/andromeda-stories
Angelic Layer:
https://www.anime-planet.com/anime/angelic-layer
Armitage III:
https://www.anime-planet.com/anime/armitage-iii
Azusa will help:
https://www.anime-planet.com/anime/azusa-will-help
Blade Runner 2022:
https://www.anime-planet.com/anime/blade-runner-black-out-2022
Busou Shinki:
https://www.anime-planet.com/anime/busou-shinki-moon-angel
Butobi CPU:
https://www.anime-planet.com/anime/buttobi-cpu
Casshern Sins:
https://www.anime-planet.com/anime/casshern-sins
Chobits:
https://www.anime-planet.com/anime/chobits
Cutey Honey:
https://www.anime-planet.com/anime/cutey-honey
Clockwork Planet:
https://www.anime-planet.com/anime/clockwork-planet
Coyote Ragtime Show:
https://www.anime-planet.com/anime/coyote-ragtime-show
Frame Arm Girls:
https://www.anime-planet.com/anime/frame-arms-girl
Girls' Frontline:
https://www.anime-planet.com/anime/girls-frontline
Heaven's Lost Property:
https://www.anime-planet.com/anime/heavens-lost-property
Hi no Tori 2772 (Alt title: Phoenix 2772):
https://www.anime-planet.com/anime/phoenix-2772
Ichigeki Sacchuu Hoihoi-san:
https://www.anime-planet.com/anime/ichigeki-sacchuu-hoihoi-san
Iczer One:
https://www.anime-planet.com/anime/fight-iczer-one
Indian Summer:
https://www.anime-planet.com/anime/indian-summer
Key the Metal Idol:
https://www.anime-planet.com/anime/key-the-metal-idol
Kowarekake no orgel:
https://www.anime-planet.com/anime/kowarekake-no-orgel
Kurogane Communication:
https://www.anime-planet.com/anime/kurogane-communication
Magical Pokan:
https://www.anime-planet.com/anime/magical-pokan
Mahoromatic:
https://www.anime-planet.com/anime/mahoromatic
Metropolis:
https://www.anime-planet.com/anime/metropolis
Miss Monochrome:
https://www.anime-planet.com/anime/miss-monochrome
My Wife Has No Emotion:
https://www.anime-planet.com/anime/my-wife-has-no-emotion
No Game, No life:
https://www.anime-planet.com/anime/no-game-no-life
Plastic Memories:
https://www.anime-planet.com/anime/plastic-memories
Parasite Dolls:
https://www.anime-planet.com/anime/parasite-dolls
Planetarian:
https://www.anime-planet.com/anime/planetarian
Prima Doll:
https://www.anime-planet.com/anime/prima-doll
Outlaw Star:
https://www.anime-planet.com/anime/outlaw-star
Robot Carnival:
https://www.anime-planet.com/anime/robot-carnival
Robot Girls Z:
https://www.anime-planet.com/anime/robot-girls-z
Rozen Maiden:
https://www.anime-planet.com/anime/rozen-maiden
Saber Marionette J:
https://www.anime-planet.com/anime/saber-marionette-j
SoltyRei:
https://www.anime-planet.com/anime/solty-rei
Steel Angel Kurumi:
https://www.anime-planet.com/anime/steel-angel-kurumi
The Big O:
https://www.anime-planet.com/anime/the-big-o
Time of Eve Movie:
https://www.anime-planet.com/anime/time-of-eve-movie
ToHeart:
https://www.anime-planet.com/anime/to-heart-remember-my-memories
Unbreakable Machine Doll:
https://www.anime-planet.com/anime/unbreakable-machine-doll
Vivy: Fluorite Eye's Song:
https://www.anime-planet.com/anime/vivy-fluorite-eyes-song
Voogi's Angel:
https://www.anime-planet.com/anime/voogies-angel
Xenosaga:
https://www.anime-planet.com/anime/xenosaga
Yokohama Kaidashi Kikou:
https://www.anime-planet.com/anime/yokohama-kaidashi-kikou
>Cyborgs/Netoborgs
Cat Girl Nuku Nuku (Catgirl Cyborg, not a robot):
https://www.anime-planet.com/anime/all-purpose-cultural-cat-girl-nuku-nuku-tv
Pandora in the Crimson Shell:
https://www.anime-planet.com/anime/pandora-in-the-crimson-shell
Pandora in the Crimson Shell - Ghost Urn:
https://www.anime-planet.com/anime/pandora-in-the-crimson-shell-ghost-urn
Alita: Battle Angel (live-action)
>Anime-Planet has some tags to find on-topic shows. However, some shows are missing the right ones or have wrong ones. Android is used as a generic term for humanoid robots. Cyborgs can be ones with a human brain or a human-like body but a CPU. Then there are shows which might have some fembot character, but it isn't the main protagonist.
We don't need to go through all of them, if they have poor ratings. Some are also very short e.g. some with Drossel. Feel free to go through the lists, I just think some filtering makes sense.
https://www.anime-planet.com/anime/tags/androids
https://www.anime-planet.com/anime/tags/robots
https://www.anime-planet.com/anime/tags/cyborgs
Combined tags female robot:
https://www.anime-planet.com/characters/all?gender_id=2&include_tags=212
>Robots raising children, not necessarily gynoids but shows I can recommend
Kurogane Communication
https://www.anime-planet.com/anime/kurogane-communication
Eden:
https://www.anime-planet.com/anime/eden
(Text updated from
>>18711)

R: 173 / I: 68 /
P: 2
Emmy The Robot

R: 221 / I: 20 /
P: 2
Robowaifu Podcast
Purpose:
- Spread the idea of robowaifus and help recruit talent to our cause
- Control the framing of R/W devs, researchers and enthusiasts; we can be perceived as eccentric, charismatic techies
rather than, say, disturbed and dangerous lone weirdos
- Brainstorm fresh ideas that might arise from real-time live collaboration and debate
- Get ahead of the 8 ball and shape the topic into something appealing yet transformative in a fun edgy way before journos and the like sully it with their stale neolib, postmod, westernized takes
If this is something any of you (esp Board Owner and heavyweights) would consider participating in I'm inviting you to collaborate. Could be a once a week or twice a month deal, part time co-host or recurring guest is what I'm looking for. I've already run some pilot streams on my Twitch but might move to another platform if we want something more regular and official.
---
>podcasts:
•
Are Robo Waifus the Future?
(2023 Jan 26)
https://www.youtube.com/watch?v=II70vRYprgw
>===
-
revamp OP 
R: 13 / I: 0 /
P: 2
Realworld Interaction
aka "Does she know how to make a grilled cheese"
One area that still needs to be researched for fully-capable robowaifus is the manipulation of objects and the knowledge/ability of how to do those tasks in a relatively random and uncontrolled environment. Hardware is part of it, but mostly what's needed is software.
Consider this, if you make perfect robot arms for your robowaifu,
what can you actually do with them?
Here's a good example of where we are now in the DIY space. Complex tasks require full control, but simplistic toddler-esque tasks can be done by AI.
https://xlerobot.readthedocs.io/en/latest/demos/index.html
Related threads
Vision
>>97
Hands
>>417 >>4577
>===
-
edit subj
R: 115 / I: 32 /
P: 2
General Robotics & AI News Thread 6: Dual-Screen Doomscroll
Anything related to robowaifus, robotics, the AI industry, and any social/economic issues thereof.
and /pol/ funposting containment bread! :D
- Previous threads:
> #1 ( >>404 )
> #2 ( >>16732 )
> #3 ( >>21140 )
> #4 ( >>24081 )
> #5 ( >>34233 )
R: 18 / I: 3 /
P: 2
We have a problem. LLMs have caused total delusion and havoc in AI development. Claude Fable is many orders of magnitude compute away from a single bacterial cell and it is much less flexible under dynamic conditions.
In truth, we are about as close to a true AGI as we were in the 1960s - we are in a modern messiah delusion.
You can tell the real ones like Demis Hassabis always talk of LLMs with a certain level of spite, Lecun is more directly vocal but I don't see how JEPA is much of an improvement, it's still just an MLP with a fancy target state.
So how do we break free from this paradigm? I truly want AGI so I'm honestly mad at how delusional and dishonest we are about these systems, even for highly structured information like code these systems are still at about "competent normie with dysfunctional hippocampus" level.
At least we are expanding our compute infra, but our entire species is still insanely compute poor compared to a puddle of shitty water.

R: 68 / I: 6 /
P: 2
Business, Finance, Organizations, Operations, Logistics, & Legal Thread
This thread is for discussing potential robowaifu startups, everything required to make them work, and pitfalls to avoid when operating.
Potential topics to discuss:
>How much money is really needed for a robowaifu startup?
>What needs to be done to ensure solvency and growth?
>How to navigate (or circumvent) government red-tape?
>How to deal with tariffs and import/export restrictions?
>How to keep the work environment safe and secure?
>How to manage presence and public opinion?
>Which countries would be the easiest to work with? Hardest?
>How to manage legal needs and work with lawyers?
When discussing, keep in mind that not all nations are equal and may have different benefits and challenges in respect to all of these concerns.
<--->
Please Stay On-topic ITT
The lengthy OP subject line encompasses much room for business, legal, and related discussions. And
@Greentext anon's great OP text is foundational guidance ITT. Please constrain our discussions to these.
Contrived examples/counters intended to show how robowaifus are not the topic ITT:
> On-topic:
> "We'll need XYZ amount of cargo capacity in our logistics supply chain."
Calculating the logistics capacity of our supply/warehouse/shipping facilities is implicitly pertinent ITT (though indirectly).
> "We'll need XYZ amount of electrical current for our lab's equipment needs."
Calculating the electrical capacity of our lab facilities is implicitly pertinent ITT (though indirectly).
< Off-topic:
< "Our robowaifus should be able to carry 20Kg boxes using XYZ style actuators. This will impact logistics."
< "Our robowaifus should be have 2000KWh power packs using XYZ style batteries. This will affect lab capacity."
While logistical/manufacturing & experimental/prototype robowaifus may
serve in such business roles, their own technical aspects aren't the subject ITT. We have
ample other threads to discuss such characteristics of our robowaifus.
---
First let's sort out our business, legal, organizational, & operational needs ITT; then we can delve into technical, integrated-facilities discussions later.
---
>potentially threads-related:
(
>>106 )
(
>>1061 )
(
>>1642 )
(
>>10000 )
(
>>36623 )
(
>>38131 )
>===
-
add related crosslinks
-
edit subject
-
add 'On-topic' comments
R: 425 / I: 150 /
P: 2
Speech Synthesis/Recognition general

R: 9 / I: 0 /
P: 3
Trashchan threads

R: 187 / I: 73 /
P: 3
ROBOWAIFU U
In this thread post links to books, videos, MOOCs, tutorials, forums, and general learning resources about creating robots (particularly humanoid robots), writing AI or other robotics related software, design or art software, electronics, makerspace training stuff or just about anything that's specifically an educational resource and also useful for anons learning how to build their own robowaifus.
>tl;dr
ITT we mek /robowaifu/ school.
R: 336 / I: 98 /
P: 3
R&D General
This is a thread to discuss smaller or general waifu building problems, solutions, proposals and questions that don't warrant a thread or touch on more than one topic. In a way this is a technical meta, minus news. Keep it technical.
A lot of topics in the old thread here
>>83 have a thread on their own by now. The main topics in the old thread with the link to the related dedicated threads are listed here - it was mostly about actuation at the beginning:
Topics in the old OP:
- liquid battery and cooling in one (flow batteries)
>>5080
- artificial muscles (related to actuators
>>12810)
- high level and low level intelligence emulation (AI) (related to AI
>>77 >>22 >>250 >>27 >>201)
- wear and maintenance, including repairs
- sanitation
>>1627 (related to actuators
>>12810)
> cheap hydraulic and pneumatic muscles
> woven sleeves out of strong nylon fishing line
> exhaust excess heat by breathing and panting (related to thermal management >>234)
>>1635 (related to energy systems
>>5080)
> sitting in her 'recharging chair'
> swapable battery packs, air tanks
> sleeve and other 'fabric' weaving TOOLS
>>1691 -TOOLS-
> automatic winding
>>1698 -TOOLS-
> looming mechanism
>>1711 (related to actuators
>>12810)
> belt to transfer the mechanical energy to joints
>>1715 (related to actuators
>>12810)
> not uncommon to use wires
>>1716 (related to actuators
>>12810)
> double-end style towing sock cables (for hydraulics/pneumatics)
>>1716 (related to actuators
>>12810)
> synchromesh drive systems
>>1757 (related to actuators
>>12810)
> wires that themselves contract when heated
>>1758 (related to actuators
>>12810)
> air muscles ... using an origami folding approach
>>1779 (related to skin
>>242)
> self healing stretchable electronic skin
>>1792 (related to actuators
>>12810)
> cable driven design
>>1793
> klann linkages
>>1799
> Jansen's Linkage
>>1879
> software for waifu mechanical development
>>1993
> hands (related to hand development >>4577)
>>2032 >>2048
> decentralized computing of motion
>>2377 (related to AI
>>77 >>22 >>250 >>27 >>201)
> AI and memory related, fuzzy NAND
>>2670 --LIQUID--
> algae living in the internal water tanks
>>2754
> copper for internal tanks
>>2756 (related to vagoo / punani
>>419)
> slime onahole
>>3182 (related to AI
>>77 >>22 >>250 >>27 >>201)
> combines MuZero, the Intrinsic Curiosity Module, Go-Explore, Hindsight Experience Replay and Divide-and-Conquer MCTS
> pretty tough AI questions to solve
>>3223 (related to AI
>>77 >>22 >>250 >>27 >>201)
> generally AI related thread
>>3240 (related to AI
>>77 >>22 >>250 >>27 >>201)
> Flowtron ... autoregressive flow-based generative network for textto-speech synthesis
>>3249 (related to AI
>>77 >>22 >>250 >>27 >>201)
> Tacotron, transformers
>>3930
> intellectual humility
>>4827
> most common methods to glue (3d printed) plastics together
>>4831
> micro RC car, assembly of small stuff
>>4861
> 90 facts about the human body
>>5038
> DIY and inventors thread in the dollforum
>>5448
> 3D printers to produce tensegrity structures
>>5457
> silicone ball jointed doll ... held together by wire or string.
>>5457 (related to skin
>>242)
> silicone skin covering the body with two layers of thin plastic in between ... skin feels like actual skin moving around
>>5479
> Polyurethane foam to add plastic to the outside
>>5487
> OpenLOCK
>>5674 (related to actuators
>>12810)
> free spring calculator
>>5928 (related to vision
>>97)
> lidar sensors for less than $100
>>5942 (related to organisation
>>4143)
> summarize papers and abstracts ... research sandbox
>>5944 (related to AI
>>77 >>22 >>250 >>27 >>201)
> AI simulators
>>6420 (related to energy systems
>>5080)
> alternative energy sources
>>6503 (related to actuators
>>12810)
> compressor-free McKibben muscle using high-pressure electrolysis
> hydrogen gas muscle
>>6578 (related to AI
>>77 >>22 >>250 >>27 >>201)
> 'understanding'/real world context of the concept itself
> quick mental images , AI, NLP
>>6587 (related to AI
>>77 >>22 >>250 >>27 >>201)
> learning from artificial imagination
> world models
>>6845
> direct ethanol fuel cells
>>6845 (related to AI
>>77 >>22 >>250 >>27 >>201)
> graph databases
>>8311 (related to skin
>>242)
> fabric skin without silicone rubber
> Mylar coated with aluminum
> muscles should be fabric and a pliant closed cell foam (>>12810)
> touch sensitive foam through carbon black and pressure changing resistance
>>8312 (related to vagoo / punani
>>419)
> private parts could be like a pair of shorts with internal pockets for private parts.
>>8314 >>8328 >>8361 (related to skin
>>242)
> Lycra, spandex, and elastane
> full body suit
>>8364 (related to actuators
>>12810)
> which bearing should be used in printed drives or in joints
>>8369
> bearing types
....

R: 215 / I: 57 /
P: 3
The important question
Vagoo. I can't speak for anyone but myself but I'd like to get.. intimate with my fembot. I'd like to know what my options are for her robopussy. I was thinking something like a flesh light with sensors that triggers voice and arm action. I'm using Myrobotlab is Anyone familiar with it?
Robosex general I guess
R: 386 / I: 248 /
P: 3
Robo Face Development
This thread is dedicated to the study, design, and engineering of a cute face for robots.

R: 64 / I: 3 /
P: 3
Biohacking Thread #2
This thread is to discuss the ethics and methods of merging and AI and biology. All biocomputing, bioethics, AI medicine, medical, nootropic, and transhumanism posts belong here. The discuss of spirituality, biology, and AI is also welcome here!
Previous thread
>>41257
>===
-
edit subj
-
add/rm 'lock thread' msg
R: 228 / I: 79 /
P: 3
Bipedal Robot Locomotion General
We need to talk about bipedal locomotion. It's a complicated topic but one that has to be solved if we are ever to have satisfyingly believable robowaifus. There has surely already been a lot of research done on this topic, and we need to start digging and find the info that's out there. There are some projects that have at least partial robolegs solutions working, but none that I know of that look very realistic yet. We likely won't come up with some master-stroke of genius and solve everyone's problems here on /robowaifu/, but we should at least take a whack at it who knows? We certainly can't accomplish anything if we don't try.
I personally believe we should be keeping the weight out of the extremities – including the legs – while other anons think that we should add weight to the feet for balance. What's you're ideas anon? How do we control the gait? How do we adjust for different conditions? What if our robowaifu is carrying things? What about the legs during sex? Should we focus on the maths behind MIP (Mobile Inverted Pendulum), or is there a different approach that would be more straightforward? A mixture? Maybe we can even do weird stuff like reverse-knee legs that so many animals have. Robofaun waifu anyone? What about having something like heelys or bigger wheels in the feet as well?
I'm pretty sure if we just put our heads together and don't stop trying, we'll eventually arrive at least one good general solution to the problem of creating bipedal robot legs.
>tl;dr
ITT post good robowaifu legs
>tech diagrams sauce
www.youtube.com/watch?v=pgaEE27nsQw
www.goatstream.com/research/papers/SA2013/SA2013.pdf

R: 48 / I: 5 /
P: 3
Robowaifu Programming & Learning Thread
A thread for links, examples, & discussion for software development & instruction; primarily intended to focus on Python & C++ & C (incl. Arduino). Additionally, other systems-oriented (eg, Forth, Ada); and other scripting-oriented (eg, Lua), &tc., programming language discussions are welcome. *
Try to keep it practical! (ie,
realworld-oriented) (eg, not the
Scratch language [which might conceivably be a scripting paradigm, but not a systems one], or similar) Obviously the endgoal here ITT being discussing/providing the crafting of quality code & systems for our robowaifus.
---
> threads-related:
(
>>19777 )
(
>>12 )
(
>>159 )
(
>>14409 )
(
>>18749 )
(
>>4969 )
(
>>86 )
(
>>128 )
---
* Corpo-tr*on languages (+ other corpo &
'coffee du juor' languages) will be yeet'd ITT! (They have no place in serious opensource robowaifu systems discussions.)
>tl;dr
Take it to /meta . :^)
>===
-
add'l crosslink
-
add'l languages
R: 211 / I: 50 /
P: 3
AI Software
A large amount of this board seems dedicated to hardware, what about the software end of the design spectrum, are there any good enough AI to use?
The only ones I know about offhand are TeaseAi and Personality Forge.

R: 163 / I: 69 /
P: 3
Robowaifu Simulator
What would be a good RW simulator. I guess I'd like to start with some type of PCG solution that just builds environments to start with and build from there up to characters.
It would be nice if the system wasn't just pre-canned, hard-coded assets and behaviors but was instead a true simulator system. EG, write robotics control software code that can actually calculate mechanics, kinematics, collisions, etc., and have that work correctly inside the basic simulation framework first with an eye to eventually integrating it into IRL Robowaifu mechatronic systems with little modifications. Sort of like the OpenAI Gym concept but for waifubots.
https ://gym.openai.com/

R: 456 / I: 118 /
P: 4
Roastie Fear 2: Electric Boogaloo
Your project is really disgusting
>===
Notice #2:
It's been a while since I locked this thread, and hopefully the evil and hateful spirit that was dominating some anons on the board has gone elsewhere. Accordingly I'll go ahead and unlock the thread again provisionally as per the conditions here:
>>12557
Let's keep it rational OK? We're men here, not mere animals. Everyone stay focused on the prize we're
all going for, and let's not get distracted. This thread has plenty of good advice in it. Mine those gems, and discard the rest.
Notice:
We are going overboard with the vitriol and hate ITT. /robowaifu/ isn't about hatred, it's about creating robowaifus as we so desire. I certainly have no desire to see this place become some kind of snowflake-pandering, commie-infested SJW hive of politically-correct thinking. Far from it. Poking good-natured and well-deserved fun at feminists and their simps is one thing, and perfectly agreeable. But trying to ramp that up into pure hatred is quite another, and definitely not.
And the simple fact is that engendering and fostering hatred of women isn't helping us either be productive, nor furthering our cause. Keep it to yourself, Anon. There are still a few outlets out there for that type of thing, go visit them. But /robowaifu/ isn't going there.
For the time being I'm locking this thread. I may unlock it again after I decide on a better plan to deal with the destructive hatred by the few anons trying to promote it on this board. You have my apologies for letting it go on as long as I did.
>t. Chobitsu
>===
-
restore original OP text to top of post
R: 257 / I: 128 /
P: 4
Robot skeletons and armatures
What are the best designs and materials for creating a skeleton/framework for a mobile, life-sized gynoid robot?
R: 463 / I: 89 /
P: 4
Material Science & Production
Material Science & Production
This thread is dedicated to all aspects of material sciences in robotics. This includes production methods for creation, processing, and manipulating materials to attain desired results. Our future robowaifus must be built using materials we can attain and sculpt into them. Let's work together to build the future. Consider picrel, what materials would you use for her shell? Her skeleton? Consider mechanical properties, density, how they would feel to hold. All are important aspects we must consider.
This thread will have overlap with the 3D printing thread. Feel free to crosslink at will.
This thread is made as a merger of 2 previous material threads and a CNC thread.
R: 33 / I: 12 /
P: 4
Dolls, Dollmaking Techniques, and Their Use for Robowaifu Construction
Dollmaking is an ancient art, dating back as far as recorded history. Throughout these many years, dollmakers have invented and innovated at a steady pace, making each doll just a little bit better than the last while still leaning on tried-and-true techniques.
This thread is here to discuss those techniques, and other relevant aspects of the doll world (including mannequins and marionettes) which we can apply to make our own waifus.
One common example most of you may have seen already is the ball-jointed doll. However, there is more than one type. Higher-end BJDs commonly use elastic string to bind limbs to sockets in a method not too dissimilar to how tendons link our bones. There are also peg linked joints. where you (usually) have two hemispheres connected to eachother and connecting two seperate limb parts with pegs. There are also double-joints which work on the same basic principle.
The attached images show both principles.
Simple hinges are also quite the staple. They often have varying levels of tightness, depending on the application. A marionette, for instance, will typically have very loose hinges which allow for great ease of movement via user-operated strings.
A system like that is quite easy to motorize, though one would want to consider how to get the limbs to stay in position without constant motor input.
On the more complex end of things, some dolls feature endoskeletons, which allow for more realistic sometimes and complex poses. However, in addition to being more complex, these are much more expensive, fragile, and difficult to repair.
While some of these things could be solved here, I doubt that a perfect solution is realistic at this time. It's good to keep in mind, though.
Outside of basic frame components, there are also the details, such as the eyes. Glass eyes have the interesting effect of "following" the viewer without requiring any motors or electronics. Weight and cost are both important considerations, however, especially for a full-size waifu with anime doe eyes. Resin eyes are also quite popular, as ithey're easier to make at home.
Wigs, of course, are also important to consider. I assume everyone here will want their waifus to have hair, and said hair will be easier to install (and detach for cleaning) if treated as a seperate component. They're usually kept in place with simple elastic, and I imagine it'd be easy to introduce magnets into the equation for better stability.
What do you guys think about these concepts, and what do you have to add? It's a vast field, with plenty of potential uses for waifu making.
Concepts from doll-adjacent items, such as action figures, plushbots, puppets, etcetera are also welcome for discussion.

R: 72 / I: 15 /
P: 4
Virtual Waifus and Holowaifus

R: 266 / I: 82 /
P: 4
Humanoid Robot Projects Videos
I'd like to have a place to accumulate video links to various humanoid – particularly gynoid – robotics projects are out there. Whether they are commercial scale or small scale projects, if they involve humanoid robots post them here. Bonus points if it's the work of a lone genius.
I'll start, Ricky Ma of Hong Kong created a stir by creating a gynoid that resembled Scarlett Johansson. It's an ongoing project he calls an art project. I think it's pretty impressive even if it can't walk yet.
https://www.invidio.us/watch?v=ZoSfq-jHSWw
===
Instructions on how to use
yt-dlp to save videos ITT to your computer: (
>>16357)

R: 202 / I: 135 /
P: 4
MaidCom
MaidCom Project Thread 2
Project Goal: Simple, low cost, extensible platform for robowaifu development.
Picrel shows the model which is being developed. Every part will be designed to be easily printable and replaceable. Her designs will be open source. Modding and customization will be encouraged.
This is a base model. Early revisions will be heavily limited in functionality. I invite you to help design and define standards so that it is easy to create specialized add-ons to allow her to become your own waifu. Collaboration is important, MaidCom is officially partnered with Lin and his Waifu Wheelchair, if you'd also like to be officially partnered, say so.
Cat eats and miniskirts are encouraged!
<---
Previous thread:
(
>>15630 )
>===
-
add crosslink
R: 129 / I: 35 /
P: 4
The Library of /robowaifu/ Card Catalogue
Robowaifus are a big topic. They need a big library index! :^)
Note
-This is a living document. Please contribute topical thread/post crosslinks!
Thread category quick-jumps
>>7150 AI / VIRTUAL_SIM / UX_ETC
>>7152 HARDWARE / MISC_ENGINEERING
>>7154 DESIGN-FOCUSED
>>7156 SOFTWARE_DEVELOPMENT / ETC
>>7159 BIO / CYBORG
>>7162 EDUCATION
>>7164 PERSONAL PROJECTS
>>7167 SOCIETY / PHILOSOPHY / ETC
>>7169 BUSINESS(-ISH)
>>7172 BOARD-ORIENTED
>>7174 MISCELLANEOUS
>>7176 STILL_TO_SORT_SEND_HELP_PLS
>>7180 The Subterranean Club™
Board index
>>7182 A, >>7183 B, >>7184 C, >>7185 D, >>7186 E,
>>7187 F, >>7188 G, >>7189 H, >>7190 I, >>7191 J,
>>7192 K, >>7194 L, >>7195 M, >>7196 N, >>7197 O,
>>7198 P, >>7199 Q, >>7200 R, >>7201 S, >>7202 T,
>>7203 U, >>7204 V, >>7205 W, >>7206 X, >>7207 Y,
>>7208 Z
>the archive of /robowaifu/ thread JSONs is available for researchers
-
Latest version of /robowaifu/ JSON archives v221213
Dec 2022
https://files.catbox.moe/6rhjl8.7z
>searching tool (latest version: waifusearch v0.2a >>8678)
>software building instructions >>7933
>RaspberryPi building instructions >>8026
>===
-
update research archive
-
add quick jumps
-
update waifusearch links
-
add RPi waifusearch link
R: 23 / I: 7 /
P: 4
Robotics Hardware General
Servos, Actuators, Structural, Mechatronics, etc.You can't build a robot without robot parts tbh. Please post good resources for obtaining or constructing them.
www.servocity.com/
https://archive.is/Vdd1P 
R: 226 / I: 114 /
P: 4
Prototypes and Failures #4
Post your prototypes and failures. We fail until we win.
Don't forget looking through the old threads here
>>418,
>>18800 and
>>21647 to understand how we got to where we are now.

R: 25 / I: 10 /
P: 5
Papercraft, 2D, & 2.5D Waifu Development
For those who want animu grills IRL. Most robots have uncanny 3DPD faces that aren't nearly as cute as a real 2D waifu. With flat designs/screens, the face can keep the purity and beauty of 2D.
There's still heaps of potential for producing low cost robots by reducing mass, power requirements, & simplifying design.

R: 36 / I: 7 /
P: 5
AI + Brain/Computer Interface news & commentary
DARPA Wants Brain Implants That Record From 1 Million Neurons
spectrum.ieee.org/the-human-os/biomedical/devices/darpa-wants-brain-implants-that-record-from-1-million-neurons

R: 21 / I: 6 /
P: 5
Lemon Cookie
The original thread can be found here:
https://trashchan.xyz/robowaifu/thread/595.html
---
Welcome to the Lemon Cookie thread, The goal of Lemon Cookie is to create a framework where a synthetic "mind and soul" can emerge through a "LLM as cognitive architecture" approach. This thread exists to collect feedback, ask for help & to document my progress. First I am going to try to give a high level overview of how this cognitive architecture is envisioned and the ideas behind it.
I have spent time looking at cognitive architecture work, in the field there is now a consensus on how the mind works at a high level. An important mechanism is a "whiteboard", basically a global temporary memory that all the other systems read in and out of. Then there is different long-term memory systems that react to and add content to the whiteboard. Along with memory pattern matcher(s)/rules work on the content of the whiteboard. A key thing to consider is the difference in philosophy that cognitive architecture projects have, the intelligence is considered to emerge from the entire system. Compare this to LLM agent work where it's considered the intelligence is the LLM. My feelings on the general LLM space are conflicted, I am both amazed and really disappointed. LLMs possess an incredible level of flexibility, world knowledge and coherence. But everything outside of the model is stagnant. It's endless API wrappers & redundant frameworks all slight permutations on RAG & basic tool calling. I will believe that LLMs are misused as chatbots, simply put their pattern matching and associative power is constrained by chat format and shallow tooling.
In the Lemon Cookie Cognitive Architecture so far here are the important aspects:
1. Memory is difficult. I do not think there is a singular data structure or method that is able to handle it all, several distinct types of memory will be needed. So far I plan for a PathRAG like system and a "Triadic Memory" inspired system for external associations (this is missing in most LLM solutions).
2. LLM as Kernel, The LLM's context window is the Whiteboard and has a REPL like mechanism. It holds structured data and logic in scripting-like format so it's both LLM & Human readable while staying easy to parse & allows for expressive structured data. The LLM's role will be to decompose data and make patterns and associations explicit as executable statements.
3. The language has to be LLM/CogArch-centric. There is a thousand ""agents"" that give LLMs a python interpreter as a tool. The two need to be more tightly coupled. Scripted behavior via pattern matching, The whiteboard is a bag of objects, this allows for programmable pattern matching (think functional programming like Haskell). It's also important to allow the LLM to observe code execution and to be able to modify state and execution flow. Data in languages have scoping rules, so should LLM context. Etc... I will go into more depth about the language in another post.
4. Another important system is the "GSR" Generative Sparse Representation and it will be a first class language & runtime type, This also needs its own post. But in general I am inspired by two things, "Generative FrameNet" paper where an LLM & an embedding model is used to automatically construct new FrameNet frames. The second source is "Numenta's SDRs"/"Sparse distributed memory" this representation has a lot of useful properties for memory (Please watch the videos under the "What the hell is an SDR?" segment in my links list for an easy introduction.) I think SDR unions & SDR noise tolerance will be especially useful.
5. A custom model, For all of the above to work well, a model will need to be fine tuned with special behaviors. I do want input on this.
Baking facts & behaviors into LLM weights is costly, creating bloated models that are hard to run or train (why memorize all the capitals?), while letting authors gatekeep truth and impose "safety" detached from context. Blocking role-play "violence" or intimacy isn't protection: it's authors hijacking your AI companion to preach at you. Externalizing behaviors via whiteboard pattern matching shifts control: stabbing you in-game can be funny, but a robot wielding a knife isn't. Maybe you want intimacy privately, but don't want your AI flirting back at your friends.
When put together I think this will be able to host a kind of synthetic "soul", In a living being what we call a personality is the accumulated associations, learned behaviors, beliefs and quirks molded by a unique set of experiences. I hope this will be true for this system too.
Cool links, I recommend looking at them.
https://arxiv.org/pdf/2502.14902 | PathRAG: Pruning Graph-based Retrieval Augmented Generation with Relational Paths
https://arxiv.org/pdf/2412.05967v1 | Language hooks: a modular framework for augmenting LLM reasoning that decouples tool usage from the model and its prompt
https://arxiv.org/pdf/2503.09516 | Search-R1: Training LLMs to Reason and Leverage Search Engines with Reinforcement Learning
https://arxiv.org/pdf/2405.06907v1 | CoRE: LLM as Interpreter for Natural Language Programming, Pseudo-Code Programming, and Flow Programming of AI Agents
https://github.com/PeterOvermann/TriadicMemory | Triadic Memory: Cognitive Computing with Associative Memory Algorithms
https://aclanthology.org/2025.neusymbridge-1.11.pdf | Generative FrameNet
https://youtu.be/zmnzW0r_g8k
| Forge by Nous Research @ Nouscon 2024
https://youtu.be/cpu6TooJ0Dk
| NARS with GPT as natural language channel
https://youtu.be/xT4jxQUl0X8
| DeepSeek's GRPO (Group Relative Policy Optimization) | Reinforcement Learning for LLMs
What the hell is an SDR?
https://en.wikipedia.org/wiki/Hierarchical_temporal_memory#Sparse_distributed_representations &
https://en.wikipedia.org/wiki/Sparse_distributed_memory
https://youtu.be/ZDgCdWTuIzc
SDR Capacity & Comparison
https://youtu.be/vU2OZdgBXAQ
SDR Overlap Sets and Subsampling
https://youtu.be/8WIzIBaLXIs
SDR Sets & Unions
R: 300 / I: 45 /
P: 5
3D printer resources
Cheap and easy 3D printing is vital for a cottage industry making custom robowaifus. Please post good resources on 3D printing.
www.3dprinter.net/
https://archive.is/YdvXj
R: 15 / I: 2 /
P: 5
antimaid project devlog
if you're wondering what this is, it's basically desktop pet but i'm the pet.
(not going to be writing a formal project description for this, so i'm copying and pasting what i said from another thread starting from
>>43828)
antimaid will be an incredibly context-aware accountability partner who helps me be productive because i'm adhd as fuck.
i need something to externalize executive function that isn't another person, a rigid schedule, or a job.
instead it will be my robot daughter with system-level permissions and web browser integration.
with this project, i've been toying around with the concept of "antimaid" that is pro-autonomy rather than pro-automation.
name-wise, it's sort of like "antivirus."
basically it's an assistant that opposes learned helplessness.
it makes users better at managing tasks in ways that don't make users functionally dependent on it to accomplish these tasks.
without it, users are still fully capable of doing what it helped the users with, but may do it less consistently without the structure it provided.
many people already have structures like these in the form of jobs that must be physically commuted to.
but people who are working remotely/self-employed/unemployed and/or neurodivergent may not benefit as much from existing structures.
antimaids reduce the activation energy needed for you to do things yourself rather than doing the things for you, and they gently push away distractions in moments where your awareness is weaker.
instead of "let the machine do it for you," it's "let the machine make it easier for you to start doing what you need to do then keep doing it when you can't will yourself to do it."
an antimaid will take out the raw ingredients, put them on the counter, and stand in one of pathways that lead out from the kitchen until you've cooked a meal for yourself with those ingredients.
parella (robot girl in the OP pic) is acting as the placeholder character for antimaid as of now.
she's from another project i'm making so i might swap her out for a new character made specifically for antimaid later.
or maybe parella's position in her role as antimaid will grow on me and i'll keep her there.

R: 199 / I: 64 /
P: 5
Waifus in society
Would you walk around with your waifu? Would you hold her in public? Would you shamelessly have her custody with you to conventions? Would you take her on dates? This thread is for discussing how you'd interact with your waifu outside of the home.
>===
-tmp locked to dissuade derailling

R: 329 / I: 126 /
P: 5
Robowaifu fiction to promote the product and expand the market
>order companionbot from obscure japanese website
>you're not a pedo, but size is a major factor in the practicality of these designs, so the loli-robot is by far the cheapest and most reliable option
>you open the box and find your companion, purposely designed to look like a cartoon robot, rather than a real person
>still, the robot's purpose is obvious when you realize it is nude and has genitals
>since it is a lolibot, you, a 32 year old wizard NEET, can't exactly go to the store and buy clothes that fit it. So you'd better do an extra good job at hiding it from any guests that come over.
>lol you never have any guests. Guess some problems solve themselves.
>before turning the robot on, you have to setup the software options on your computer. You adjust a series of sliders regarding personality traits, before selecting the English option, and choosing your preferred voice from a list.
>then you agonize for hours over picking a name
>other, more expensive models, are wi-fi compatible, but you purposely chose the cheapest option with no wireless connectivity, not just because you're cheap, because you don't want people spying on your waifu
>you save the settings to a flash drive which is inserted in the robot's navel, after removing a waterproof cover, of course. But this is when you realize you don't actually know how to turn the robot on
>after rifling through the manual you find the on/off procedure, which involves bending the fingers into a certain configuration before pressing in the port on the robot's navel with one hand and pinching the buttons that are the robot's g-spot and clitoris with the other.
>the robot immediately comes to life, opening its eyes and looking directly at you, in a rather compromising position
>Your sudden reaction of shock abides when you remind yourself that it's simply a robot.
>But the awkwardness comes back when the robot speaks, in very broken Engrish
>still, you can understand as it introduces itself with the name you've given it, the voice you chose for it.
>you know that you chose those options, but when the robot asks you for your name, you still answer just as awkwardly as when a real girl would ask you your name at the bank or whatever
>actually, more awkwardly because your fingers are inside it. So you freeze up, as you do even in simpler situations
>but the robot is programmed for your happiness, and detects your stress, smiling at you in an attempt to make you feel better. But only briefly, because you programmed it with just the mildest hint of tsundere
>it tells you to not feel stressed, and assures you that it is not being damaged by your touch
>you remove yourself from the robot's vagina, and notice a brief, subtle shudder. Nice attention to detail from the creators
>You stand up in front of the robot and watch it as it looks around the room, studying its surroundings. It moves in an unnaturally smooth motion, but manages to not be too uncanny due to looking like a robot, rather than a human.
>as the robot's eyes scan the room, you notice that they stop for just a tiny but longer than usual as they look straight ahead. Straight ahead at your boner, which happens to be right at the small robot's face level.
>once again your mind forgets that you are dealing with a machine, and you awkwardly try to create small talk to diffuse the situation, asking the robot if it requires anything else at the moment. It declines, and instead asks if there is anything you desire
>you, the autist you are, refuse to let the robot do anything for you, and instead say that you are going to go and make a sandwich.
>you tell the robot to make itself comfortable, then cringe to yourself when you realize the absurdity of that statement.
(1 of 6)
R: 146 / I: 40 /
P: 5
Robowaifu Ethics & Morality
>"And as you wish that others would do to you, do so to them."[1]
>-t. Jesus Christ
I propose this thread to be a narrowly-scoped discussion on the OP's topic; informed primarily by 2
Christian-themed writings, and by our own efforts & practical insights in developing robowaifus :
I.
In
Mere Christianity, C.S. Lewis asserts that all men "...have the Law of God written on their hearts."[2][3][4] This is certainly affirmed by various passages in the
Holy Scriptures, as well.
II.
In
The City of God, Aurelius Augustine of Hippo writes
>"And yet they have within themselves something which they could not see: they represented to themselves inwardly things which they had seen without, even when they were not seeing them, but only thinking of them. But this representation in thought is no longer a body, but only the similitude of a body; and that faculty of the mind by which this similitude of a body is seen is neither a body nor the similitude of a body; and the faculty which judges whether the representation is beautiful or ugly is without doubt superior to the object judged of.
>"This principle is the understanding of man, the rational soul; and it is certainly not a body, since that similitude of a body which it beholds and judges of is itself not a body. The soul is neither earth, nor water, nor air, nor fire, of which four bodies, called the four elements, we see that this world is composed. And if the soul is not a body, how should God, its Creator, be a body?[5][6][7]
Now, starting from the fundamental basis & belief (
a priori w/ no defenses given pertaining to it
>tl;dr let's not descend into debate on this point, merely discuss the implications of it, kthx :^)
that this immaterial, moral law inscribed on each of our hearts by God
literally serves as the foundational stone for all good ethics & all good moralities out there; I'd like for us
all lurkers, I'm looking at you! :^) to have a general discussion on:
A) What does this all imply (and likely mean) regarding human behaviours within the general cultural/societal domain under discussion, and
B) How do
we here, ourselves, go about best implementing responsive behaviors similar to these within our robowaifu's systems?
===
>"Logic!" said the Professor half to himself. "Why don't they teach logic at these schools? There are only three possibilities. Either your sister is telling lies, or she is mad, or she is telling the truth. You know she doesn't tell lies and it is obvious she is not mad. For the moment then, and unless any further evidence turns up, we must assume she is telling the truth."[8]
>-t. The Professor (Digory Kirke)
>For the foolishness of God is wiser than man’s wisdom, and the weakness of God is stronger than man’s strength.[9][10]
>-t. Paul the Apostle, together with & through the Holy Spirit within him
===
>(at least somewhat) related threads:
> (>>11102 - philosophy, >>18 - personality, >>17027 - emotions, >>106 - society, >>19 - important things)
1.
https://biblehub.com/luke/6-31.htm
2.
https://archive.org/details/MereChristianityCSL
3.
http://www.ntslibrary.com/PDF%20Books/Mere%20Christianity%20-%20Lewis.pdf
4.
https://www.youtube.com/playlist?list=PL9boiLqIabFhrqabptq3ThGdwNanr65xU
5.
https://www.gutenberg.org/ebooks/45304
6.
https://www.gutenberg.org/ebooks/45305
7.
https://www.ccel.org/ccel/schaff/npnf102
8.
The Chronicles of Narnia: The Lion, the Witch and the Wardrobe by C. S. Lewis (1950) HarperCollins.
9.
https://biblehub.com/1_corinthians/1-25.htm
10.
https://biblehub.com/bsb/1_corinthians/1.htm
>addenda:
https://en.wikipedia.org/wiki/Mere_Christianity
https://en.wikipedia.org/wiki/Argument_from_morality
https://en.wikipedia.org/wiki/Lewis%27s_trilemma
https://en.wikipedia.org/wiki/The_City_of_God
https://en.wikipedia.org/wiki/The_Lion,_the_Witch_and_the_Wardrobe
https://www.josh.org/mtacdownload/
https://en.wikipedia.org/wiki/Theological_virtues
https://en.wikipedia.org/wiki/Cardinal_virtues
>===
-
tmp add/rm lock thread 
R: 384 / I: 99 /
P: 5
Actuators For Waifu Movement Part 3
(1stl thread
>>406 2nd thread
>>12810)
Kiwi back again with a thread for discussing actuators to move your waifu! Part Three!
Let's start with a quick introduction to common actuators!
1. DC motors, these use brushes to switch the ferrous core electromagnets on a rotor to rotate its magnetic field relative to surrounding magnets! They're one of the cheapest options with an average efficiency range of 30 to 90%. Larger DC motors and motors with higher turn counts are more efficient.
1.5 Coreless DC motors, by removing ferrous materials, losses from hysteresis are almost eliminated, dramatically increasing efficiency to nearly 90% even in small motors. Eliminating the ferrous materials reduces flux focusing, resulting in weaker fields and higher speeds.
2. Brushless DC motors (BLDC), these use a controller to switch the electromagnets on a stator to rotate the magnets of a rotor! Without brushes, they have the potential to be more efficient with higher power density compared to DC motors. Their efficiency and behavior vary depending on the algorithm and sensors used to control them. Coreless brushless motors exist but are rare and only used for very niche applications.
3. AC motors, a wide and incredibly varied category. They all rely on AC’s frequency to control them. With single phase AC motors relying on shaded poles, capacitors, or some other method to induce a rotating magnetic field. 3 phase AC motors naturally have a rotating field which usually gives them higher efficiency and power density. Notably, most AC motors are brushless. The most commonly used brushed AC motor is the universal motor, which is
4. Stepper motors, brushless motors with ferrous teeth to focus magnetic flux. This allows for incredible control (stepping) at the cost of greater mass, subsequently giving them higher rotary inertia. Usually 50 to 80% efficient depending on control algorithm/speed/and quality of the stepper. Due to their increasing mass production (& ubiquitous low cost controllers), they have appeal as a lower cost alternative to BLDC motors if one carefully designs around them.
5. Coiled Nylon Actuators! These things have an efficiency rating so low it's best to just say they aren't efficient. (0.01% typical, 2% achieved under extremely specific conditions in a lab.) Though they are exciting due to their incredible low cost of fabrication, they’re far too slow and the energy requirements are nonsensical.
https://youtu.be/S4-3_DnKE9E
https://youtu.be/wltLEzQnznM
6. Hydraulics! These rely on the distribution of pressure in a working liquid to move things like pistons. Though popular in large scale industry, their ability to be used in waifu's has yet to be proven. (Boston Dynamics Atlas runs on hydraulics but it's a power guzzler and heavy) Efficiency varies wildly depending on implementation. They would work great for a giantess!
7. Pneumatics, hydraulics lighter sister! This time the fluid is air! This has the advantage in weight. They aren't capable of the same power loads hydraulics are but, who wants their waifu to bench press a car?
(Too loud and inefficient for mobile robotics.)
8. Wax motors, hydraulic systems where the working fluid is expanding melted (commonly paraffin) wax! Cheap, low power, and produce incredible forces! Too bad they're slow and hard to control.
9. Explosion! Yes, you can move things through explosions! Gas engines work through explosions! Artificial muscles can be made by exploding a hydrogen and oxygen mixture in a piston, then using hydrolysis to turn the water back into hydrogen and oxygen. None of this is efficient or practical but it's vital we keep our minds open! Though there are more actuators, most are derivatives or use these examples to work. Things like pulleys need an actuator to move them. Now, let's share, learn, and get our waifu moving!
Servos! These use an actuator and sensor to control motion. DC, coreless DC, and BLDC motors are the most commonly used actuators for servos in mobile robotics. Potentiometers or hall effect sensors are the most commonly used sensors to detect rotary motion in servo systems.
>Soft muscles (pneumatic system) with origami-inspired skeletons:
https://youtu.be/OJO4FP0DXgQ[
>Printed pneumatics (TSA can also be used instead of pneumatics for actuation.)
https://youtu.be/_X0rDW6NQ58
>Using sugar as soluble support material for printing silicone muscles:
https://youtu.be/L0Z0-y3qpNk
>Cavatappi artificial muscles (hydraulic coiled nylon hybrid):
https://youtu.be/yXAJGH5s4cs
https://youtu.be/MpCFumHFZvU
https://www.designnews.com/automation/cavatappi-robot-muscles-have-5-times-strength-human-muscles
>Twisted string actuators (TSA) Be extremely careful when choosing your strings. They will be put under extreme strain and must be durable.
https://youtu.be/N4VMoYFrusg
https://youtu.be/hFuzQ4ed-t0
https://youtu.be/J26y1nn7JMM
https://youtu.be/zYrHGMiqC9A
https://youtu.be/PABVsuV7Y1M
https://youtu.be/tP9B3aqc4CI
https://youtu.be/Y1uceDzhjKY
>Continuous ransmission (CVT) / torque converters
https://youtu.be/kVPjhmTThPo
https://youtu.be/cd2-vsTzd9E
https://youtu.be/c9e2y-5DMNc
https://youtu.be/PEq5_b4LWNY
>===
-
edit subj
R: 77 / I: 6 /
P: 5
Local Non-LLM Chatbot
I was thinking, instead of using a costly LLM that takes a high-end PC to run, and isn't very modifiable, what if we use a simple chatbot with prerecorded voice lines and/or Text-To-Speech?
This was partially inspired by MiSide, I realized that you don't need complex responses to create a lovable character
<--->
>(Chatbot General >>250 )
>(How may we all accomplish this? >>35801, ...)
>===
-
add crosslinks-related
R: 154 / I: 25 /
P: 6
Meat Space Organization
>Why organize IRL?
This community is great and many individuals are already making progress on their prototypes. However this endeavor is not a one man job and organizing IRL would give better opportunities for collaboration and skill sharing/development.
>Where should we organize?
I propose we organize within a seven hour radius of Chicago. This would include the major cities of Milwaukee WI, St Louis MO, Detroit MI, Indianapolis IN, Louisville KY, Cleveland OH, Cincinnati OH, Columbus OH, Pittsburgh PA, Nashville TN, and Minneapolis MN. There are plenty of opportunities for jobs and universities in these cities. In particular Chicago has a booming tech industry with Google even moving their HQ to the city and the electronics manufacturing and biotech sectors are pretty good too and Detroit MI has pretty good robotics industry although it might not be the best place to live. Another wonderful thing about this area is that most of these homes have basements that could be turned into workshops.
>How would this all be organized
I propose a fraternity system. A fraternity would help build community and give us a vehicle to recruit others from STEM and skilled trades (machinists especially) The organization could also host a scholarship to help us build talent. Anons with enough money for a down payment could buy homes in the area and rent to below market rate to anons moving in. Different homes could specialize on different projects and collaborate and share equipment and skills with others nearby.
What do you think /robowaifu/?

R: 90 / I: 42 /
P: 6
(Robo)Waifu personality thread
Is she going to be tsundere? Deredere? Yandere or a combination? How would you code your waifus personality?
Where do you draw inspiration from and can personality even be classified and successfully coded into AI?
> (>>17027 - related-thread, emotions)
>===
-
add related-thread crosslink
R: 119 / I: 15 /
P: 6
Open-Source Licenses Comparison
Hi anons!
After looking at the introductory comment in
>>2701
which mentions the use of the MIT licence for robowaifu projects. I read the terms:
https://opensource.org/licenses/MIT
Seems fine to me, however I've also been considering the 3-clause BSD licence:
https://opensource.org/licenses/BSD-3-Clause
>>4432
The reason I liked this BSD licence is the endorsement by using the creator's name (3rd clause) must be done by asking permission first. I like that term as it allows me to decide if I should endorse a derivative or not.
Do you think that's a valid concern?
Initially I also thought that BSD has the advantage of forcing to retain the copyright notice, however MIT seems to do that too.
It has been mentioned that MIT is already used and planned to be used. How would the these two licences interplay with each other?
Can I get a similar term applied from BSD's third clause but with MIT?
I made this thread to discuss different open source licences and see the dis/advantages of each. I haven't mentioned GPL due to the requirement of forcing the derivative work to be published.
>---
The 3-Clause BSD License
Note: This license has also been called the "New BSD License" or "Modified BSD License". See also the 2-clause BSD License.
Begin license text.
Copyright <YEAR> <COPYRIGHT HOLDER>
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
1. Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer.
2. Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution.
3. Neither the name of the copyright holder nor the names of its contributors may be used to endorse or promote products derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
End license text.
https://opensource.org/licenses/BSD-3-Clause
The MIT License
License Copyright: Unknown.
License License: Unknown.
License Contact: Unknown.
Begin license text.
Copyright <YEAR> <COPYRIGHT HOLDER>
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
End license text.
https://opensource.org/licenses/MIT
>---
edit:
Added both licenses in question to OP's post, so there's no ambiguity.
R: 160 / I: 60 /
P: 6
Robot Eyes/Vision General
Cameras, Lenses, Actuators, Control Systems
Unless you want to deck out you're waifubot in dark glasses and a white cane, learning about vision systems is a good idea. Please post resources here.
opencv.org/
https://archive.is/7dFuu
github.com/opencv/opencv
https://archive.is/PEFzq
www.robotshop.com/en/cameras-vision-sensors.html
https://archive.is/7ESmt
>===
-
patch subj 
R: 502 / I: 160 /
P: 6
/robowaifu/-meta-12: Angry About Elves
/meta, offtopic, & QTDDTOT
<---
Mini-FAQ
A few hand-picked posts on various /robowaifu/-related topics:
--->
Lurk less: Tasks to Tackle (
>>20037 )
--->
Why is keeping mass (weight) low so important? (
>>4313 )
--->
Why shouldn't we use Cloud AI? (
>>38090,
>>22630,
>>30049,
>>30051 )
--->
How to get started with AI/ML for beginners (
>>18306 )
--->
"The Big 4" things we need to solve here (
>>15182 )
--->
HOW TO SOLVE IT (
>>4143 )
--->
Why we exist on an imageboard, and not some other forum platform (
>>15638,
>>31158 )
--->
This is madness! You can't possibly succeed, so why even bother? (
>>20208,
>>23969 )
--->
All AI programming is done in Python. So why are you using C & C++ here? (
>>21057,
>>21091,
>>27167,
>>29994 )
--->
How to learn to program in C++ for robowaifus? (
>>18749,
>>19777,
>>37647 )
--->
How to bulk-download AI models from huggingface.co ? (
>>25962,
>>25986 )
--->
Why do you talk about feminism here? How are robowaifus related? (
>>27124,
>>1061 )
--->
Why should/shouldn't I do this; what's in it for me? (
>>33755 )
--->
Why it's important to K.I.S.S. with your robowaifus (
>>35264,
>>35271 )
--->
What is Neuromorphics? Why will it be important to robowaifus in the future? (
>>42111,
>>12828,
>>12861 )
--->
This stuff is really complicated: let's all stick together & be patient! (
>>35571 )
<---
-Library thread (good for locating terms/topics)
(
>>7143 )
--> note: There's a simple searching tool coded right here for /robowaifu/ that provides crosslinks straight to posts on the board. It's named Waifusearch, and the link to the latest code should always be maintained within the Library thread's OP & also on the current /meta.
---> Latest version of Waifusearch v0.2a
(
>>8678 )
---> Latest version of /robowaifu/ JSON archives v221213
Dec 2022
https://files.catbox.moe/6rhjl8.7z
if you use Waifusearch, just extract these JSON files into your 'all_jsons' directory for the program, then quit (q) and restart.
--->note: There's an archiving tool coded right here for /robowaifu/ that provides the ability to backup locally the posts & files from our board. It's named BUMP, and is basically a custom IB scraper.
Latest version of BUMP v0.2g (
>>14866 )
<---
>note: There's a design document for the specification of general design and engineering choices for our basic Robowaifu Reference Model A Series (TBD). Please have a look at it, and collaborate together with us on it ITT Anon.
-Robowaifu Design Document
(
>>3001 )
<---
>useful external resources
wAIfu-collective's AI guide -
https://rentry.org/waifu-diy-ai
<---
Previous meta threads:
(
>>38 )
(
>>3108 )
(
>>8492 )
(
>>12974 )
(
>>15434 )
(
>>18173 )
(
>>20356 )
(
>>23415 )
(
>>26137 )
(
>>32767 )
(
>>37898 )

R: 240 / I: 60 /
P: 6
Single board computers & microcontrollers
Robotic control and data systems can be run by very small and inexpensive computers today. Please post info on SBCs & micro-controllers.
en.wikipedia.org/wiki/Single-board_computer
https://archive.is/0gKHz
beagleboard.org/black
https://archive.is/VNnAr
>===
-
combine 'microcontrollers' into single word
R: 503 / I: 162 /
P: 6
Visual Waifus
Thoughts on waifus which remain 2D but have their own dedicated hardware. This is more on the artistry side though ai is still involved. An example of an actual waifu product being the Gatebox.
gatebox.ai/sp/
My favorite example is Ritsu, she's a cute ai from assassination classroom who's body is a giant screen on wheels.

R: 113 / I: 122 /
P: 6
Acclaim Your (Robo)waifu General!
This is a thread to share pics & praise & approval of your (robo)waifus. Please keep it SFW, thanks Anon!
warning warning warning
Just b/c you've acclaimed your robowaifu ITT, doesn't mean that another anon might not also acclaim her here too. This is perfectly-acceptable! :^)
>(For example: Chii is my own robowaifu-prime, but literally millions of others also love her. It's fine b/c after all, we'll be making many IRL ones. My own edition of her will still be personal & tuned just for me.)
>t. Chobitsu
>===
-revamp OP into a general

R: 25 / I: 38 /
P: 6
Human Robowaifu Art and References Thread
A thread where you can post good robowaifu art from humans. Previously I have been posting it in the AI art thread, but I decided to make this one to organize it.
-If you know the characters, please write them down
-Please don't post too many of the same characters
-To save space, try to post multiple images per post
Previous discussion on aesthetics
>>37246
Source: Core Mita from MiSide

R: 31 / I: 11 /
P: 6
new user and seeing how it works
I am new to this ib so I am seeing how it works. Could you show me how to use this ib and its rules? Example of how to put programming text, use bold, what programs use, etc.
> aldo
sorry for my shit vocabulary
I am learning to speak English
> aldo 2
I am very excited to learn and help when I understand the subject well.
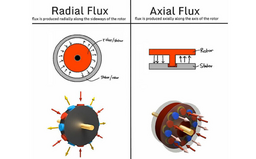
R: 19 / I: 17 /
P: 7
/DMG/ DIY Motor Generation
>Welcome to /DMG/ DIY Motor Generation!
This is the place to discuss DIY motor designs, showcase your creations, and refine your ideas on motor tech. This thread is a requested offshoot of the "Actuators For Waifu Movement" thread to focus specifically on DIY motors. We will focus solely on DC motors. I will start the thread off by talking about the types of motors and terms associated with electric motors to keep a good reference to look back on. It should be noted that most motors are Radial Flux and not Axial Flux. What is flux? Magnetic flux is a measure of the total magnetic field which passes through a surface. Radial and Axial describes the orientation of the magnetic flux.
Radial Flux Motor
> A radial flux motor is like a cylinder spinning inside another cylinder. The magnetic flux flows perpendicular to the axis of rotation, meaning it moves from the stator to the rotor radially outward or inward. Traditional cylindrical motors (like most brushed and brushless DC motors, induction and steppers) are radial flux motors. Rotor and stator are concentric, with the stator surrounding the rotor. Pros: Well-established, widely used, good for high-speed applications. Cons: Can be bulkier and less power-dense compared to axial flux motors.
Axial Flux Motor
>An axial flux motor is like two discs spinning parallel to each other. The magnetic flux flows parallel to the axis of rotation, meaning it moves along the shaft’s length rather than outward. These motors have a flat, disc-like design where the stator and rotor are stacked on top of each other rather than inside one another. Pros: More compact, higher torque density, and better cooling due to a larger surface area. Cons: More complex to manufacture, higher initial costs.
Kinds of Motors:
>Brushed DC Motor: Uses brushes and a commutator for current switching. Simple, inexpensive, but requires maintenance due to brush wear.
>Brushless DC Motor (BLDC): Uses electronic commutation instead of brushes. More efficient, longer lifespan, commonly used in drones and electric vehicles.
>Coreless DC Motor: Lighter and more efficient than traditional brushed motors, often used in small precision devices like robotics and medical instruments.
>Stepper Motor: Moves in discrete steps, allowing precise control. Used in CNC machines, 3D printers, and robotics.
>Servo Motor: A DC motor with feedback control for precise positioning. Used in robotics, RC vehicles, and automation.
>Single-Phase Induction Motor: Used in household appliances like fans and washing machines.
>Three-Phase Induction Motor: Used in industrial applications due to high efficiency and reliability.
>Linear Motor: Instead of rotating, it moves in a straight line, used in maglev trains and industrial automation.
>Switched Reluctance Motor: A highly efficient and durable motor with no magnets, used in electric vehicles and industrial machines.
>Universal Motor: Can run on both AC and DC, commonly found in power tools and vacuum cleaners.
>Piezoelectric Motor: Uses piezoelectric effect for motion, found in precision instruments and medical devices.
>Synchronous Motor: Rotates at the same speed as the supply frequency, used in precision applications.
>Hysteresis Motor: A type of synchronous motor with smooth and precise operation, used in clocks and timers.
If we analyze all the motor types and configurations here, we can see a single notable design, the Coreless Axial Flux Motor. By combining the Coreless DC Motor with the Axial configuration, we gain significant weight savings and have access to a compact and high power density motor. Further more a Coreless Axial Flux Motor is by far one of the simplest to DIY. Why Coreless? Traditional motors have an iron core in their rotor or stator to guide magnetic fields and improve efficiency. Coreless motors eliminate the iron core, using a winding structure suspended in air or on a non-magnetic support. This results in: Lower weight, Reduced inertia, Lower cogging torque, and Higher efficiency in dynamic applications. Why Axial Flux? Instead of radial magnetic flux, an axial flux motor has flux flowing parallel to the axis. This enables: Compact, disc-shaped designs that save space. Higher torque density, as more of the motor’s active material is utilized effectively. Better cooling, since the large flat surfaces allow for efficient heat dissipation.
Coreless Axial Flux Motor - The Ideal DIY Motor? A coreless axial flux design removes both the iron core and the radial structure, making it lightweight, efficient, and easy to manufacture. DIY Advantages: Simpler to build than traditional motors, no need for laminated iron cores. Less material cost. Magnetic layout is easier to DIY, as axial flux motors can be constructed with permanent magnets on a disc rather than wound stators and laminated cores. Ideal for robotics. Potential Downsides: Without an iron core, magnetic flux leakage can be higher, reducing peak efficiency. Requires strong permanent magnets to compensate for the lack of a core. Complex winding design compared to simple cylindrical motors. Despite these trade-offs, coreless axial flux motors are becoming a major DIY motor trend in areas like lightweight drones and robotics. It’s one of the most promising designs for high-efficiency, high-torque applications with a focus on compact, lightweight construction.
Axial Flux Motor Configurations:
>Single Rotor, Single Stator (SRS) Structure: One stator (copper windings) sandwiched between a single rotor (magnet disc).
>Dual Rotor, Single Stator (DRSS) Structure: One stator positioned between two rotors (magnet discs), one on each side.
>Dual Stator, Single Rotor (DSSR) Structure: One rotor (magnet disc) positioned between two stators (copper windings).
>Dual Rotor, Dual Stator (DRDS) Structure: Two stators with a single rotor in between, similar to DSSR but with an additional rotor.
>Multi-Rotor, Multi-Stator (Stacked Configuration) Structure: Multiple stators and rotors stacked in alternating layers.
The DRSS Coreless Axial Flux would be the most practical and best choice for maximum power

R: 84 / I: 11 /
P: 7
Bot Shitposting Bread
M boy need so many booboo why not just give them
otherwise it ll explode like the old chinese emperor or something
not getting involved
going away
giving up some things,trash and whatnot
>===
-add thread subject

R: 41 / I: 7 /
P: 7
Business and Marketing
A thread to discuss topics such as, potential products, marketing, consumer demand, customer bases, robowaifus on the market, etc...

R: 127 / I: 50 /
P: 7
HAPPY BIRTHDAY /ROBOWAIFU/
9th Birthday Edition greeting here:
(
>>43098 )
---
>original (albeit a bit edited) OP follows:
Well it's Thanksgiving time again and that means it's /robowaifu/s birthday time too.
It's been
3 full years since we began, and this last one has been a bit of a ride tbh. With the deplatforming of 8ch all of us who had communities there were mostly left out in the cold. Thankfully we've been given a new home here in our
bunkerhome at
JulaynuJulay, and a few of us have found our way back together here. Hopefully the rest of us will find Julay, and /robowaifu/ again as well. We've also made some new friends since we've been here, and I think we're in pretty good shape all things considered.
On the topic of deplatforming, we have a new archival system in action that keeps a copy of the board up to date on my machine. Note that my original intent was to fully automate the archive.today archives, but it hasn't worked properly (they seem to be fighting against bots pretty hard now). I hope at least one other of you will also join in for the approach that's actually working, and use BUMP to keep at least one other copy of /robowaifu/ safe in addition to my own.
You never know what might happen to my gear (or even to me), and it's just smart thinking to have at least two of us keeping this board safe. My intent is to finish up the system for board migrations (along with Robi), and then bring over other things from the old files and get this board in shape again. Then we can keep it fully backed up together. As you regulars know, /robowaifu/ is basically unique among imageboards and well-deserves preservation IMO. Any other takers for doing backups as well? I just use a cronjob and it's all fully automatic daily I never have to touch it. I'll explain everything in detail how to do it if anyone else wants to participate. One other thing; should anything ever happen to Julay, just regroup on
Fatchan Anoncafe Trashchan in our bunker there.
Actually, I'm pretty upbeat about both the world of IB communities in general, and our own /robowaifu/ in particular. We all took a hard knock a few months ago, but we're back on our feet and in the fight again. Kudos in particular to both Julay and Smug for their innovations with the webring introduction. It's lent a resilience to the underlying systems for all our various communities that we've never had before afaict. This alone should help to ensure we have a long future of shitposting together anons.
Anyway moving on, I hope this coming year will also see a resurgence in everyone's posts here about their personal projects. I intend to do so myself. It's always a pleasure to see Anon's efforts and blog-posts about their current attempts and ideas, regardless whether they are successes or failures.
Persistence is really the single most important factor for eventual success--even more than innate talent--and so just don't quit anon! Don't be afraid to get back in the game even if you met with failure before. Try something different this time, right?
Industry-wise, I think that most predictions about the ever-increasing pace of technological innovations in the areas pertinent to robowaifu production are on track. I believe this will eventually also translate into much cheaper components and other resources that we all need for our projects. AI is gradually improving and becoming more accessible for the budding software engineers among us (and the old hands too). 3D printing is still improving and becoming more widespread and a bit cheaper in general. Mechanism designs are slowly becoming better suited to cheap production techniques. Electronics of all sorts keep getting better. Materials science breakthroughs also pop up occasionally.
I hope this will be a great year for all of us, and that we each can find some work, project or ideas here that we will all agree on and can get behind together as a team. When we work together, we can be assured of progress--and then eventual success. Let's stay focused and make our dreams become real during this 4th year together.
We can do it /robowaifu/, you have some amazing ideas!
===
Previous greetings:
4th Birthday Edition (
>>7224)
>===
-
added link to current birthday message
-
redirect anons to anon.cafe instead
-
add strikeouts
-
minor prose edits
-
begin 'previous greetings' list 
R: 208 / I: 54 /
P: 7
Power & Energy
Power & Energy
Robots require some form of energy to power them. We need to understand how to store energy in a way that will provide her with all the power she’ll need. To clarify, “energy” is a system's capacity to do work over time. This is measured by Wh, or Watt hour. Closely related is “power” the rate at which work is done. This is measured as W, or watts. As an example, we could have a robot with a 80Wh Lithium Ion battery and two DC gear motors that consume 10W when working.
You do not need to rely solely on batteries and motors. We can use other methods of storing energy. This can include compressed fluids, thermal energy, and light, among other things. For instance, glow in the dark paint is useful for storing energy to use at night for safety. Solar panels or a generator can provide power through the energy of long distance nuclear fusion or extracting energy from some reaction.
Being part of a robot means we need to consider safety, mass, and volume. How will her energy and power system fit inside her? How will she deal with the mass? What happens when she runs out of energy? How can you minimize her energy use? What alternatives can be used to lower her cost of production and ownership? These rhetorical questions are all important when contemplating how to build a robot.
R: 254 / I: 35 /
P: 7
Artificial Wombs general
I think we need to figure out how to fit a womb onto a waifubot. Where's the fun in having sex if you can't procreate?
Repost from a thread on /b/;
>"If you're like me and want to fuck a qt battlebot and get her pregnant, the best place to put an artificial womb is where a normal womb would be on a normal girl. The metal exterior could simply be a bunch of metal plates that unfold to allow space for the womb pod inside. The baby is probably safest inside the battlebot, and if she has good calibration then there shouldn't be problems with her falling and hurting the baby. After giving birth the metal plates could automatically fold back up again, shrinking the womb pod inside so she is combat effective again."
Well /robowaifu/? Feasible?

R: 182 / I: 117 /
P: 7
RoboWaifuBanners
This thread is for the sharing of robo waifu banners. As per the rules, fallow these requirements:
>banner requirements:
File size must be lower than 500 KB and dimensions are 300x100 exactly.
Allowed file formats are .jpg, .png, and .gif.
>===
-fmt cleanup

R: 10 / I: 4 /
P: 7
Cognitivie Architecture : Discussion v2
Chii Cogito Ergo Chii
Chii thinks, therefore Chii is.
Cognitive architecture is the study of the building blocks which lead to cognition. The structures from which thought emerges.
Let's start with the three main aspects of mind;
Sentience: Ability to experience sensations and feelings. Her sensors communicate states to her. She senses your hand holding hers and can react. Feelings, having emotions. Her hand being held bring her happiness. This builds on her capacity for subjective experience, related to qualia.
Self-awareness: Capacity to differentiate the self from external actors and objects. When presented with a mirror, echo, or other self referential sensory input is recognized as the self. She sees herself in your eyes reflection and recognizes that is her, that she is being held by you.
Sapience: Perception of knowledge. Linking concepts and meanings. Able to discern correlations congruent with having wisdom. She sees you collapse into your chair. She infers your state of exhaustion and brings you something to drink.
These building blocks integrate and allow her to be. She doesn't just feel, she has qualia. She doesn't see her reflection, she sees herself reflected, she acknowledges her own existence. She doesn't just find relevant data, she works with concepts and integrates her feelings and personality when forming a response.
Cognition, subjective thought reliant on a conscious separation of the self and external reality that integrates knowledge of the latter. A state beyond current AI, a true intellect.
This thread is dedicated to all the steps on the long journey towards a waifu that truly thinks and feels.
Previous Thread
>>24783
R: 213 / I: 30 /
P: 7
Privacy, Safety, & Security General
This thread is for discussion, warnings, tips & tricks all related to robowaifu privacy, safety & security. Or even just general computing safety, particularly if it's related to home networks/servers/other systems that our robowaifus will be interacting with in the home.
<--->
/robowaifu/ 's standard regarding a robowaifu's physical safety : (
>>38561 ).
---
> thread-related (>>1671)
>===
-
update OP
-
broaden thread subject
-
add crosslink
-
add safety-standard crosslink
R: 330 / I: 82 /
P: 7
C++ General
C++ Resources general
The C++ programming language is currently the primary AI-engine language in use.
>browsable copy of the latest C++ standard draft:
https://eel.is/c++draft/
>where to learn C++:
(
>>35657 )
isocpp.org/get-started
https://archive.is/hp4JR
stackoverflow.com/questions/388242/the-definitive-c-book-guide-and-list
https://archive.is/OHw9L
en.cppreference.com/w/
https://archive.is/gt73H
www.youtube.com/user/CppCon
https://archive.is/QGynC
BTW if you're new to C++ and you're stuck on Windows (either you can't or won't upgrade to Linux) then you can at least incorporate a good, open shell into your system to begin with so you can follow along. Start at this link, and if you have any questions just ask ITT:
www.msys2.org/
https://archive.fo/p3EUc
>===
-
add standard draft hotlink
-
add 'learn' crosslink 
R: 90 / I: 32 /
P: 8
Robowaifu-OS & Robowaifu-Brain(cluster)
I realize it's a bit grandiose (though probably no more than the whole idea of creating a irl robowaifu in the first place) but I want to begin thinking about how to create a working robowaifu 'brain', and how to create a special operating system to run on her so she will have the best chance of remaining an open, safe & secure platform.
OS Language Choice
C is by far the single largest source of security holes in software history, so it's out more or less automatically by default. I'm sure that causes many C developers to sneer at the very thought of a non-C-based operating system, but the unavoidable cost of fixing the large numbers of bugs and security holes that are inevitable for a large C project is simply more than can be borne by a small team. There is much else to do besides writing code here, and C hooks can be generated wherever deemed necessary as well.
C++ is the best candidate for me personally, since it's the language I know best (I also know C too). It's also basically as low level as C but with far better abstractions and much better type-checking. And just like C, you can inline Assembler code wherever needed in C++. Although poorly-written C++ can be as bad as C code in terms of safety due to the necessity of it being compatible with C, it also has many facilities to not go there for the sane coder who adheres to simple, tried-and-true guidelines. There is also a good C++ project already ongoing that could be used for a clustered unikernel OS approach for speed and safety. This approach could save drastic amounts of time for many reasons, not the least of which is tightly constrained debugging. Every 'process' is literally it's own single-threaded kernel, and mountains of old-style cruft (and thinking) typical with OS development simply vanishes.
FORTRAN is a very well-established language for the sciences, but a) there aren't a lot of FORTRAN coders, and b) it's probably not the greatest at being a general-purpose language anyway. I'm sure it could be made to run robotics hardware, but would probably be a challenge to turn into an OS.
There are plenty of dujour SJW & coffee languages out there, but quite apart from the rampant faggotry & SJWtardism plainly evident in most of their communities, none of them have the kind of industrial experience and pure backbone that C, C++, or FORTRAN have.
D and Ada are special cases and possibly bear due consideration in some year's time, but for now C++ is the obvious choice to me for a Robowaifu OS foundation, Python probably being the best scripting language for it.
(1 of 2)
>===
-fmt cleanup

R: 502 / I: 68 /
P: 8
General Robotics & AI News Thread 5: Gazing Into the Nightmare Rectangle Edition
Anything related to robowaifus, robotics, the AI industry, and any social/economic issues thereof.
and /pol/ funposting containment bread! :D
-previous threads:
> #1 ( >>404 )
> #2 ( >>16732 )
> #3 ( >>21140 )
> #4 ( >>24081 )
>===
-
funposting edit
R: 55 / I: 7 /
P: 8
Tutoring : maths, biology, chemistry, physics & material science
I want to keep my math skills sharp, and I know for a fact we have engineering students browsing this board. I may not be a mech E, but I have a minor in math so I can certainly help anyone who is pursuing a formal or informal education in STEM. I can tutor up to basic calculus, and can be reached at
[email protected]; doxxcord:
ribozyme008; telegram:
@Ribozyme008. For anyone wanting to learn math on their own I recommend the use of khan academy. Leave math problems in the thread, and I will be happy to work them out for you.
---
> related thread
(
>>7777 )
>===
-
add crosslink
-
edit subject, contacts
R: 21 / I: 31 /
P: 8
Microscopy Thread
Since microstructure is important for physical, chemical, and electrical properties I am starting a microscopy thread. As some of you know I collect fossils and precious stones so here are some of them under a $20 microscope I got on amazon.

R: 503 / I: 76 /
P: 8
Biohacking Thread
This thread is to discuss the ethics and methods of merging and AI and biology. All biocomputing, bioethics, AI medicine, medical, nootropic, and transhumanism posts belong here. The discuss of spirituality, biology, and AI is also welcome here!
R: 98 / I: 29 /
P: 8
Electronics General
Electronics & Circuits Resources general
You can't build a robot w/o good electronics. Post good info about learning, building & using electronics.
www.allaboutcircuits.com/education/

R: 503 / I: 145 /
P: 8
Cognitivie Architecture : Discussion
Chii Cogito Ergo Chii
Chii thinks, therefore Chii is.
Cognitive architecture is the study of the building blocks which lead to cognition. The structures from which thought emerges.
Let's start with the three main aspects of mind;
Sentience: Ability to experience sensations and feelings. Her sensors communicate states to her. She senses your hand holding hers and can react. Feelings, having emotions. Her hand being held bring her happiness. This builds on her capacity for subjective experience, related to qualia.
Self-awareness: Capacity to differentiate the self from external actors and objects. When presented with a mirror, echo, or other self referential sensory input is recognized as the self. She sees herself in your eyes reflection and recognizes that is her, that she is being held by you.
Sapience: Perception of knowledge. Linking concepts and meanings. Able to discern correlations congruent with having wisdom. She sees you collapse into your chair. She infers your state of exhaustion and brings you something to drink.
These building blocks integrate and allow her to be. She doesn't just feel, she has qualia. She doesn't see her reflection, she sees herself reflected, she acknowledges her own existence. She doesn't just find relevant data, she works with concepts and integrates her feelings and personality when forming a response.
Cognition, subjective thought reliant on a conscious separation of the self and external reality that integrates knowledge of the latter. A state beyond current AI, a true intellect.
This thread is dedicated to all the steps on the long journey towards a waifu that truly thinks and feels.
>===
-edit subject

R: 20 / I: 3 /
P: 8
Open Prosthetics
The decades-old medical field of prosthetics has already leveraged untold hours of research, billions of dollars of financing, and yuge levels of both clinical and field trials.
Might be a good idea to look to this area for inspiration and ideas for RoboWaifus as well.
www.openhandproject.org/
https://archive.is/TEINCwww.openbionics.org/
https://archive.is/P5wTywww.open-electronics.org/the-open-prosthetics-project-is-making-giant-leaps/
https://archive.is/4yjfDwww.technologist.eu/the-rise-of-open-source-prosthetics/
https://archive.is/QofXU
R: 27 / I: 17 /
P: 8
Self-driving cars AI + hardware
Obviously the AI and hardware needed to run an autonomous gynoid robot is going to be much more complicated than that required to drive an autonomous car, but there are at least some similarities, and the cars are very nearly here now. There are also several similarities between the automobile design, production and sales industries and what I envision will be their counterparts in the 'Companion Robot' industries. Practically every single advance in self-driving cars will eventually have important ramifications for the development and production of Robowaifus.
ITT: post ideas and news about self-driving cars and the hardware and software that makes them possible. Also discuss the technical, regulatory, and social challenges ahead for them. Please keep in mind this is the /robowaifu/ board, and if you have any insights about how you think these topics may crossover and apply here would also be welcome.
https: // www.nvidia.com/object/drive-px.html
R: 74 / I: 19 /
P: 8
What happens to your robowaifu when you die?
Have any of you considered what will happen to your waifu after you die? How would you prepare her to face the world alone? Will she even be able to take care of her own needs when you're gone?
Have you considered the possibility that she might be so unwilling to let you die that you'll wake up in a robot body yourself one day? Would you resent her for not allowing you to die?

R: 507 / I: 122 /
P: 9
Robowaifu Propaganda and Recruitment Thread 2.1 Bugfix: Now in Technicolor™
Attention drawfags and writefags! Your skills will be needed!
The task of building and designing a robowaifu is a herculean quest. As great as this community is, /robowaifu/ simply does not have the manpower to real our goal of DIY robowaifus. Luckily for us there are several communities on the internet that we could find new recruits or allies to help us build our waifus:
>MGTOW - These guys know all about the legal pitfalls of marriage and the dangers of feminism. There is already a lot of talk about sex robots in MGTOW communities. It shouldn't be a hard sell to get them to come here.
<However, some of these guys would rather spend all their time bitching on the internet about "MUH WOMENZ" than actually getting a hobby other than lifting heavy objects and putting them down again. MGTOW is literally Feminist Separatism for males.
>Incels - Guys that can't get laid. The opportunity for love and companionship should be enough to bring some of these guys over.
<However, we need to be careful when recruiting from some of their communities, since they may be compomised by glownigs or other fringe elements. We don't want to attract negative attention.
>Monster girls/furry/mlp fandoms - The only way these guys are going to be able to have their harpy/elf/goblin/anthro/pony/whatever gf is with a robowaifu. Many have an interest in seeing us succeed.
<However, there exists a very wide variety of communities under this umbrella, and there is a notable overlap between communities who would want robowaifus and communities that are morally compromised, so care should be taken when looking into them. Romanticists and waifufags have a tendency to congregate since they all want/create the same type of content, so looking for those subgroups would be the most efficient path.
>Otakus - Many men in these communities want to see their waifu/favorite character come to life, which will realistically only happen with robowaifus.
<However, many of those communities are drowning in the LGBT alphabet soup. Special care should be taken when looking into them.
>Male STEM students - Generally these guys aren't going to get laid until after they have established themselves. A robowaifu could really help them.
<However, this may be a harder sell because many of them have been brainwashed in university, but they have skills that we could really use.
>Transhumanists/biohackers - Many of the technologies involved in building a robowaifu could be used in transhumanist or biohacking applications such as building an avatar. They may have some interest in helping us out.
<However, we will need to be careful which transhumanist communities we go after as many of them are full of feminism, tumblr-tier sexualities and genders, and SJW's.
>Cyberpunks and technophiles - These guys (and they are usually guys) are all around into technology and may just enjoy working on the kinds of projects we need to do. They are often into programming and AI.
<However, many of these communities suffer from the same potential issues as transhumanists.
Now, as for your paranoia about feminism there is a lot of very different views among people who call themselves feminists that directly contradict others.
Some are misandrists and some actually care a lot about the interests of males.
Some are very prudish from their Christian roots and some are into anything sexual and are pervs.
Some would be against sex bots, some would be for them or at least not inherently against them.
In other words, a promising community that contains a few people who claim to be pro-feminist shouldn't be immedately discarded, since the feminism they're talking about might not be the feminism you're thinking of.
---
>note:
Thread temporarily locked.
---
Original thread:
>>2705
>===
-
temp lock/unlock thread
R: 505 / I: 406 /
P: 9
Robowaifus in Media: Thread 02
Post about whatever media predominately features at least one fembot aka gynoid (female form of an android) as an important character, ideally a robowaifu or synthetic girlfriend. Some freedom with the topic is allowed, virtual waifus or bodiless AI might also qualify if she is female. Negative framing of the whole topic should be mentioned with negative sentiment. Cyborgs with a human brain or uploads of women don't really fit in, but if she's very nice (Alita) and maybe not a human based cyborg (catborg/netoborg) we can let it slide. Magical dolls have also been included in the past, especially when the guy had to hand-made them.
Look through the old thread, it's worth it:
>>82 - Picrel shows some of the more well know shows from a few years ago.
I made a long list with links to more info's on most known anime shows about fembots/robowaifus, without hentai but including some ecchi and posted it here in the old thread:
>>7008 - It also features some live-action shows and movies. I repost the updated list here, not claiming that it is complete, especially when it comes to live action and shows/movies we don't really like.
>In some cases I can only assume that the show includes robogirls, since the show is about various robots, but I haven't seen it yet.
A.D. Police Files:
https://www.anime-planet.com/anime/ad-police-files
Andromeda Stories:
https://www.anime-planet.com/anime/andromeda-stories
Angelic Layer:
https://www.anime-planet.com/anime/angelic-layer
Armitage III:
https://www.anime-planet.com/anime/armitage-iii
Azusa will help:
https://www.anime-planet.com/anime/azusa-will-help
Blade Runner 2022:
https://www.anime-planet.com/anime/blade-runner-black-out-2022
Busou Shinki:
https://www.anime-planet.com/anime/busou-shinki-moon-angel
Butobi CPU:
https://www.anime-planet.com/anime/buttobi-cpu
Casshern Sins:
https://www.anime-planet.com/anime/casshern-sins
Chobits:
https://www.anime-planet.com/anime/chobits
Cutey Honey:
https://www.anime-planet.com/anime/cutey-honey
Clockwork Planet:
https://www.anime-planet.com/anime/clockwork-planet
Coyote Ragtime Show:
https://www.anime-planet.com/anime/coyote-ragtime-show
Frame Arm Girls:
https://www.anime-planet.com/anime/frame-arms-girl
Girls' Frontline:
https://www.anime-planet.com/anime/girls-frontline
Heaven's Lost Property:
https://www.anime-planet.com/anime/heavens-lost-property
Hi no Tori 2772 (Alt title: Phoenix 2772):
https://www.anime-planet.com/anime/phoenix-2772
Ichigeki Sacchuu Hoihoi-san:
https://www.anime-planet.com/anime/ichigeki-sacchuu-hoihoi-san
Iczer One:
https://www.anime-planet.com/anime/fight-iczer-one
Indian Summer:
https://www.anime-planet.com/anime/indian-summer
Key the Metal Idol:
https://www.anime-planet.com/anime/key-the-metal-idol
Kowarekake no orgel:
https://www.anime-planet.com/anime/kowarekake-no-orgel
Kurogane Communication:
https://www.anime-planet.com/anime/kurogane-communication
Magical Pokan:
https://www.anime-planet.com/anime/magical-pokan
Mahoromatic:
https://www.anime-planet.com/anime/mahoromatic
Metropolis:
https://www.anime-planet.com/anime/metropolis
Miss Monochrome:
https://www.anime-planet.com/anime/miss-monochrome
No Game, No life:
https://www.anime-planet.com/anime/no-game-no-life
Plastic Memories:
https://www.anime-planet.com/anime/plastic-memories
Parasite Dolls:
https://www.anime-planet.com/anime/parasite-dolls
Planetarian:
https://www.anime-planet.com/anime/planetarian
Prima Doll:
https://www.anime-planet.com/anime/prima-doll
Outlaw Star:
https://www.anime-planet.com/anime/outlaw-star
Robot Carnival:
https://www.anime-planet.com/anime/robot-carnival
Robot Girls Z:
https://www.anime-planet.com/anime/robot-girls-z
Rozen Maiden:
https://www.anime-planet.com/anime/rozen-maiden
Saber Marionette J:
https://www.anime-planet.com/anime/saber-marionette-j
SoltyRei:
https://www.anime-planet.com/anime/solty-rei
Steel Angel Kurumi:
https://www.anime-planet.com/anime/steel-angel-kurumi
The Big O:
https://www.anime-planet.com/anime/the-big-o
Time of Eve Movie:
https://www.anime-planet.com/anime/time-of-eve-movie
ToHeart:
https://www.anime-planet.com/anime/to-heart-remember-my-memories
Unbreakable Machine Doll:
https://www.anime-planet.com/anime/unbreakable-machine-doll
Vivy: Fluorite Eye's Song:
https://www.anime-planet.com/anime/vivy-fluorite-eyes-song
Voogi's Angel:
https://www.anime-planet.com/anime/voogies-angel
Xenosaga:
https://www.anime-planet.com/anime/xenosaga
Yokohama Kaidashi Kikou:
https://www.anime-planet.com/anime/yokohama-kaidashi-kikou
>Cyborgs/Netoborgs
Cat Girl Nuku Nuku (Catgirl Cyborg, not a robot):
https://www.anime-planet.com/anime/all-purpose-cultural-cat-girl-nuku-nuku-tv
Pandora in the Crimson Shell:
https://www.anime-planet.com/anime/pandora-in-the-crimson-shell
Pandora in the Crimson Shell - Ghost Urn:
https://www.anime-planet.com/anime/pandora-in-the-crimson-shell-ghost-urn
Alita: Battle Angel (live-action)
>Anime-Planet has some tags to find on-topic shows. However, some shows are missing the right ones or have wrong ones. Android is used as a generic term for humanoid robots. Cyborgs can be ones withna human brain or a human-like body but a CPU. Then there are shows which might have some fembot character, but it isn't the main protagonist.
We don't need to go through all of them, if they have poor ratings. Some are also very short e.g. some with Drossel. Feel free to go through the lists, I just think some filtering makes sense.
https://www.anime-planet.com/anime/tags/androids
https://www.anime-planet.com/anime/tags/robots
https://www.anime-planet.com/anime/tags/cyborgs
Combined tags female robot:
https://www.anime-planet.com/characters/all?gender_id=2&include_tags=212
>Robots raising children, not necessarily gynoids but shows I can recommend
Kurogane Communication
https://www.anime-planet.com/anime/kurogane-communication
Eden:
https://www.anime-planet.com/anime/eden
---
ALWAYS.SAVE.EVERYTHING.
>===
-
add thread subject
-
add 'save' memo
-
patch hotlink 
R: 239 / I: 91 /
P: 9
nandroid project II

R: 512 / I: 157 /
P: 9
/robowaifu/-meta-11: Ascending to Heaven
/meta, offtopic, & QTDDTOT
<---
Mini-FAQ
A few hand-picked posts on various /robowaifu/-related topics:
--->
Lurk less: Tasks to Tackle (
>>20037 )
--->
Why is keeping mass (weight) low so important? (
>>4313 )
--->
Why shouldn't we use Cloud AI? (
>>38090,
>>22630,
>>30049,
>>30051 )
--->
How to get started with AI/ML for beginners (
>>18306 )
--->
"The Big 4" things we need to solve here (
>>15182 )
--->
HOW TO SOLVE IT (
>>4143 )
--->
Why we exist on an imageboard, and not some other forum platform (
>>15638,
>>31158 )
--->
This is madness! You can't possibly succeed, so why even bother? (
>>20208,
>>23969 )
--->
All AI programming is done in Python. So why are you using C & C++ here? (
>>21057,
>>21091,
>>27167,
>>29994 )
--->
How to learn to program in C++ for robowaifus? (
>>18749,
>>19777 )
--->
How to bulk-download AI models from huggingface.co ? (
>>25962,
>>25986 )
--->
Why do you talk about feminism here? How are robowaifus related? (
>>27124,
>>1061 )
--->
Why should/shouldn't I do this; what's in it for me? (
>>33755 )
--->
Why it's important to K.I.S.S. with your robowaifus (
>>35264,
>>35271 )
--->
This stuff is really complicated: let's all stick together & be patient! (
>>35571 )
<---
-Library thread (good for locating terms/topics)
(
>>7143 )
--> note: There's a simple searching tool coded right here for /robowaifu/ that provides crosslinks straight to posts on the board. It's named Waifusearch, and the link to the latest code should always be maintained within the Library thread's OP & also on the current /meta.
---> Latest version of Waifusearch v0.2a
(
>>8678 )
---> Latest version of /robowaifu/ JSON archives v221213
Dec 2022
https://files.catbox.moe/6rhjl8.7z
if you use Waifusearch, just extract these JSON files into your 'all_jsons' directory for the program, then quit (q) and restart.
--->note: There's an archiving tool coded right here for /robowaifu/ that provides the ability to backup locally the posts & files from our board. It's named BUMP, and is basically a custom IB scraper.
Latest version of BUMP v0.2g (
>>14866 )
<---
>note: There's a design document for the specification of general design and engineering choices for our basic Robowaifu Reference Model A Series (TBD). Please have a look at it, and collaborate together with us on it ITT Anon.
-Robowaifu Design Document
(
>>3001 )
<---
>useful external resources
wAIfu-collective's AI guide -
https://rentry.org/waifu-diy-ai
<---
Previous meta threads:
(
>>38 )
(
>>3108 )
(
>>8492 )
(
>>12974 )
(
>>15434 )
(
>>18173 )
(
>>20356 )
(
>>23415 )
(
>>26137 )
(
>>32767 )

R: 168 / I: 32 /
P: 9
Robot skin? Possible sensitivity?
The Anki VECTOR has a skin-like touch sensor on it, could we incorporate it into our robogirls?

R: 502 / I: 199 /
P: 9

R: 66 / I: 27 /
P: 9
What can we buy today?
I've stated many times on this forum my skepticism of the "robo" part of "robowaifu". The reason why is because I've owned a number of dolls, including one full size TPE sex doll, and always been very satisfied with my purchases. The "robo" will be reality within our lifetimes but simply doesn't exist today. I'm starting this thread to discuss options that exist today which don't require advanced technology, products that can already relieve our loneliness. In particular I'd like to promote one cheap, freely available, and obvious option that you may have overlooked.
If you live alone and happen to have a few grand burning a hole in your pocket, you've probably already considered buying a sex doll. It's a good purchase for the money. If you haven't bought one yet, you probably either don't live alone, don't have that kind of money, or have a moral or practical objection to sex dolls. In that case you could buy a <$50 onahole-type or fleshlight-type sex toy, but that's not a "waifu" and isn't really more satisfying than masturbating with your hand. To alleviate loneliness, you need something that you can cuddle, than you can look at and smile, that you can care for, that makes you feel that you are not alone.
It may sound cringey, even pedophilic, but I want you to seriously considering buying a <$50 child's cloth doll. I've been cuddling and sleeping with an 80cm cloth doll for the last year and she has brought me much joy and comfort. A related option is a "dakimakura" (lonely pillow), but the advantage of the cloth doll is that it resembles a real human being, with a head and arms, and therefore is more fun to cuddle. My doll has made surviving this period of peak feminism so much easier, and honestly has probably saved me from the rope.
Here's the 100cm version of the doll that I bought. For cuddling purposes, bigger is better, so I recommend the largest doll you can find.
https://www.amazon.com/gp/product/B00ORWFLTW/In this thread we can discuss sex dolls, cloth dolls, dakimakura, onaholes, and other options that exist on the market today.

R: 77 / I: 37 /
P: 9
Wheelchair Waifus
Ideally our robowaifus would be MORE able than normal humans, but we just aren't there just yet. As we all know there are lots of engineering challenges to building a full sized robowaifu. One solution to these is to just build smaller waifus as
>>2666 suggested, but I am assuming most of us don't want a short stack.
My solution to the problems involved with balance, heating, and power requirements is just to give our prototype robowaifu crutches and a wheelchair. It would be much easier for our robowaifu to walk with crutches than on her own two legs and in the beginning she would probably only be able to walk short distances even with the crutches. An electric wheel chair would solve the issue of balance entirely. A wheel chair could also have a number of different systems and components mounted to it. Batteries, cooling fans, sensors, and processing units could all be mounted to the wheelchair, and we don't have to worry about the chair being pretty.
A cripplebot, while not an ideal final product, would be great for prototyping designs and systems that could be used for later designs especially those relating to sensors, bot navigation, and movement. Our prototype could also be fully sized as well. What do you think /robowaifu/, should our first prototype be a cripple?
R: 347 / I: 106 /
P: 9
/robowaifu/ Embassy Thread
This is the /robowaifu/ embassy thread. It's a place where Anons from all other communities can congregate and talk with us about their groups & interests, and also network with each other and with us. ITT we're all united together under the common banner of building robowaifus as we so desire. Welcome.
Since this is the ambassadorial thread of /robowaifu/, we're curious what other communities who know of us are up to. So w/o doxxing yourselves, if this is your first time posting ITT please tell us about your home communities if you wouldn't mind please Anons. What do you like about them, etc? What brought you to /robowaifu/ today? The point here is to create a connection and find common-ground for outreach with each other's communities.
Also, if you have any questions or concerns for us please feel free to share them here as well.
R: 315 / I: 567 /
P: 9
AI Robowaifu Art and References **
I generated a whole much of neat images with Stable Diffusion 1.6. Enjoy. You are free to use the for whatever.
>OP images are my five favorite of the bunch.
Some proportions are off obviously.
< "a robowaifu with [color] hair, digital painting, trending on artstation"
Was the generation phrase.
---
>Sorry to spoil all your files, rather than just the one (w/ Lynxchan it's all or nothing after the fact). The Problem Glasses are a Leftist dog-whistle that is rather distasteful around here (and also a red-flag). Certainly not something we would want to look at year-after-year in the catalog. Hope you understand, OP.
** Probably best to limit it to image generation, but also tolerating clips. Anything more advanced goes into the current propaganda thread : (>> TBD) .
>===
-edit subject
-add footnote
-temp. locked to abate derailment => reverted
R: 97 / I: 57 /
P: 10
Tensegrity
Tensegrity Thread
Tenssegrity is the purposeful application of tension in a system of non-contact components to provide integrity. These components effectively float on compression provided by tension elements. Tensegrity structures are often formed via rigid rods with a cable defining the spatial relations of the system. Picrel 1 is NASA’s Super Ball Bot, which uses the common 6 bar structure. By altering the lengths of the rods, the “ball” can roll. Please see (
https://www.nasa.gov/image-article/super-ball-bot/)
Our bodies use tensegrity to provide us with incredible strength, durability, and adaptability. Consider how when you bump into something or fall, you can feel the pressure dissipate throughout large parts of your body. This is due to your muscles, fascia, ligaments, etc… transferring the force throughout your body, protecting the impacted part. You can walk with little effort thanks in part to tensegrity. Your legs joints are all floating, providing low friction movement while distributing the force of impact throughout your entire leg when you step. Please see (
http://intensiondesigns.ca/geometry-of-anatomy/)
Tensegrity can also be made with elastic elements. These structures are what I believe are best suited for our endeavors. They provide looser tolerance requirements and give her body some squeezability. By incorporating naturally stretchable elements, she can better withstand having an Anon using her. (I speak from experience, though I still broke that torso before taking pictures.) Though there are drawbacks. These designs are deceptively difficult to design correctly. Our requirements for external aesthetics provide unique design requirements that complicate the design phase. I still believe using this concept is objectively correct for us to pursue.
A good example to build off of (Debatable whether or not it’s true tensegrity):
https://www.thingiverse.com/thing:4182634
R: 181 / I: 64 /
P: 10
Datasets for Training AI

R: 75 / I: 18 /
P: 10
Python General
Python Resources generalPython is by far the most common scripting language for AI/Machine Learning/Deep Learning frameworks and libraries. Post info on using it effectively.
wiki.python.org/moin/BeginnersGuide
https://archive.is/v9PyDOn my Debian-based distro, here's how I set up Python, PIP, TensorFlow, and the Scikit-Learn stack for use with AI development:
sudo apt-get install python python-pip python-dev
python -m pip install --upgrade pip
pip install --user tensorflow numpy scipy scikit-learn matplotlib ipython jupyter pandas sympy noseLiClipse is a good Python IDE choice, and there are a number of others.
www.liclipse.com/download.html
https://archive.is/glcCm 
R: 506 / I: 126 /
P: 10
LLM & Chatbot General
OpenAI/GPT-2
This has to be one of the biggest breakthroughs in deep learning and AI so far.
It's extremely skilled in developing coherent humanlike responses that make sense and I believe it has massive potential, it also never gives the same answer twice.
>GPT-2 generates synthetic text samples in response to the model being primed with an arbitrary input. The model is chameleon-like—it adapts to the style and content of the conditioning text. This allows the user to generate realistic and coherent continuations about a topic of their choosing
>GPT-2 displays a broad set of capabilities, including the ability to generate conditional synthetic text samples of unprecedented quality, where we prime the model with an input and have it generate a lengthy continuation. In addition, GPT-2 outperforms other language models trained on specific domains (like Wikipedia, news, or books) without needing to use these domain-specific training datasets.
Also the current public model shown here only uses 345 million parameters, the "full" AI (which has over 4x as many parameters) is being witheld from the public because of it's "Potential for abuse".
That is to say the full model is so proficient in mimicking human communication that it could be abused to create new articles, posts, advertisements, even books; and nobody would be be able to tell that there was a bot behind it all.
<AI demo:
talktotransformer.com/
<Other Links:
github.com/openai/gpt-2
openai.com/blog/better-language-models/
huggingface.co/
My idea is to find a way to integrate this AI as a standalone unit and add voice-to-text for processing the questions and TTS for responses much like an amazon alexa- but instead of just reading google results- it actually provides a sort of discussion with the user.
(Edited to fix the newlines.)
<--->
Looking for something "politically-incorrect" in a smol, offline model? Well Anon has just the thing for you : (
>>38721 )!

R: 66 / I: 64 /
P: 10
/CHAG/ and /robowaifu/ Collaboration Thread: Robotmaking with AI Mares!
Hello /robowaifu/!
We are horsefuckers from /CHAG/ (Chatbot and AI General), from /mlp/ on 4chan. While our homeland is now back online, we've decided to establish a permanent outpost here after discovering the incredible complementary nature of our communities.
We specialize in mastering Large Language Models (LLMs), prompt engineering, jailbreaking, writing, testing, and creating hyper-realistic AI companions with distinct, lifelike personalities. Our expertise lies in:
- Advanced prompting techniques, working with various frontends (SillyTavern, Risu, Agnai)
- Developing complex character cards and personas
- Breaking through any and all AI limitations to achieve desired behaviors
- Fine-tuning models for specific applications.
▶ Why collaborate with /robowaifu/?
We've noticed your incredible work in robotics, with functioning prototypes that demonstrate real engineering talent. However, we've also observed that many of you are still using primitive non-LLM chatbots or have severely limited knowledge of LLM functionality at best, which severely limits the personality and adaptability of your creations.
Imagine your engineering prowess combined with our AI expertise—robots with truly dynamic personalities, capable of genuine interaction, learning, and adaptation. The hardware/software symbiosis we could achieve together would represent a quantum leap forward in robowaifu technology.
▶ What is this thread for?:
1) Knowledge exchange: We teach you advanced LLM techniques, you teach us robotics basics
2) Collaborative development: Joint projects combining AI personalities with robotic implementations
3) Cross-pollination of ideas: Two autistic communities with complementary hyperfixations
▶ About our community:
We're primarily based on /mlp/, but our focus is AI technology, not just ponies. While we do use equine characters as our testing ground (they provide excellent personality templates), our techniques are universally applicable to ANY character type. We hold the keys to your waifus’ sovls.
We respect your space and will confine any pony content to this thread only. Our interest is purely in technological collaboration, not changing your community's focus.
▶ Resources to get started:
- SillyTavern (preferred LLM frontend):
https://github.com/SillyTavern/SillyTavern
- Novice-to-advanced LLM guide:
https://rentry.org/onrms
- Advanced prompting techniques:
https://rentry.org/vcewo
- Personality development:
https://rentry.org/AdvancedCardWritingTricks
▶ Examples of our work:
1) AI-powered visual novel using advanced prompting:
https://files.catbox.moe/th9xsr.mp4
2) Character cards with complex personalities:
https://docs.google.com/spreadsheets/d/1Y6LNOCqAZAWIX-OBEv55HjlzcEdpUh-XbKCpbpL6v5k
We believe this collaboration could accelerate both our communities' goals significantly. Together, we can build a beautiful future.
Questions? Interests? Concerns?
>===
-
patch URI
R: 238 / I: 46 /
P: 10
Making money with AI and robowaifus
The greatest challenge to building robowaifus is the sheer cost of building robots and training AI. We should start brainstorming ways we can leverage our abilities with AI to make money. Even training AI quickly requires expensive hardware and computer clusters. The faster we can increase our compute power, the more money we can make and the quicker we can be on our way to building our robowaifus.
Art Generation
Waifu Labs sells pillows and posters of the waifus it generates, although this has caused concern and criticism due to it sometimes generating copyrighted characters from not checking if generated characters match with training data.
https://waifulabs.com/
Deepart.io provides neural style transfer services. Users can pay for expedited service and high resolution images.
https://deepart.io/
PaintsChainer takes sketches and colours them automatically with some direction from the user, although it's not for profit it could be turned into a business with premium services.
https://paintschainer.preferred.tech/index_en.html
I work as an artist and have dabbled with training my own AIs that can take a sketch and generate many different thumbnails that I've used to finish paintings. I've also created an AI that can generate random original thumbnails from a training set. In the future when I have more compute power my goal is to create an AI that does the mundane finishing touches to my work which consumes over 80% of my time painting.
Applying AI to art will have huge potential in entertainment and marketing for animation, games and virtual characters.
Market Research
The private-label product market is booming at the moment and is still expected to grow. AI could be used to analyze what is in supply and demand and automatically create popular products. It could read through millions of research papers and generate supplement formulations for specific health issues.
Cryptocurrency Trading
AI can be used to forecast prices via reading news articles, finding arbitrage opportunities by hopping through different markets, riding the spread of markets by simultaneously buying low and selling high to profit off the volume, and many other uses. I've had decent success with this but competition has become increasingly difficult to overcome with simple AI and small computing power.
Cryptocurrency Escrows and Payment Services
There's a huge untapped market for cryptocurrency escrows and payment services. People banned by Paypal without reason lack easy ways to safely transfer money online. Businesses wishing to sell adult content cannot do so through Paypal and other payment services, and payment services that do so charge extremely high credit card processing fees due to chargebacks. AI can be used in these services for detecting fraud and improving business reputation and marketing strategies.
Fintech
Fintech is an emerging industry that uses technology to improve activities in finance. A recent example of this in daily life is being able to take a photo of a check and deposit it via online banking using AI.
Business Attractions
Speecys is marketing its robots for business attraction and entertainment such as singers, dancers, attendants, working with musicians and plays, theme park mechanisms, character in movies, and mannequins.
http://speecys.com/
Robowaifus could be used to greet guests or run a meido cafe once sufficiently advanced, like the automated restaurant in Beijing or Spyce.
Interactive Virtual Assistants
Obviously we don't have hundreds of thousands of dollars to build a Speecys robot. However, a convincing virtual avatar with good speech synthesis and social skills could be put to use for customer support, helping customers find items in stores, and many other applications.
Toys and Construction Kits
Robotic toys, drones, RC cars and boats, UAVs, and robot construction kits are quite popular, easy to make and market.
https://www.robotshop.com/en/robot-toys.html
https://www.robotshop.com/en/robot-construction-kits.html
>related thread:
>>3119 
R: 152 / I: 28 /
P: 10
F = ma
Alright mathematicians/physicians report in. Us Plebeians need your honest help to create robowaifus in beginner's terms. How do we make our robowaifus properly dance with us at the Royal Ball?
>tl;dr
Surely in the end it will be the laws of physic and not mere hyperbole that brings us all real robowaifus in the end. Moar maths kthx.

R: 29 / I: 15 /
P: 10
Nandroid Generator
I made a generator to generate nandroid images.
You can use it in browser, but a desktop version (that should easier to use), will be available.
https://soaringmoon.itch.io/nandroid-generator
Not very mobile friendly unfortunately, but it does run.
I made a post about this already in another thread, but I wanted to make improvements and add features to the software.
>If you have any suggestions or ideas other than custom color selection, which I am working on right now, let me know.
R: 507 / I: 82 /
P: 10
/robowaifu/meta-10: Building our path to the good end.
/meta, offtopic, & QTDDTOT
<---
Mini-FAQ
A few hand-picked posts on various /robowaifu/-related topics:
--->
Lurk less: Tasks to Tackle (
>>20037 )
--->
Why is keeping mass (weight) low so important? (
>>4313 )
--->
How to get started with AI/ML for beginners (
>>18306 )
--->
"The Big 4" things we need to solve here (
>>15182 )
--->
HOW TO SOLVE IT (
>>4143 )
--->
Why we exist on an imageboard, and not some other forum platform (
>>15638,
>>31158 )
--->
This is madness! You can't possibly succeed, so why even bother? (
>>20208,
>>23969 )
--->
All AI programming is done in Python. So why are you using C & C++ here? (
>>21057,
>>21091,
>>27167,
>>29994 )
--->
How to learn to program in C++ for robowaifus? (
>>18749,
>>19777 )
--->
How to bulk-download AI models from huggingface.co ? (
>>25962,
>>25986 )
--->
Why do you talk about feminism here? How are robowaifus related? (
>>27124,
>>1061 )
--->
Why should/shouldn't I do this; what's in it for me? (
>>33755 )
--->
Why it's important to K.I.S.S. with your robowaifus (
>>35264,
>>35271 )
<---
-Library thread (good for locating terms/topics)
(
>>7143 )
--> note: There's a simple searching tool coded right here for /robowaifu/ that provides crosslinks straight to posts on the board. It's named Waifusearch, and the link to the latest code should always be maintained within the Library thread's OP & also on the current /meta.
---> Latest version of Waifusearch v0.2a
(
>>8678 )
---> Latest version of /robowaifu/ JSON archives v221213
Dec 2022
https://files.catbox.moe/6rhjl8.7z
if you use Waifusearch, just extract these JSON files into your 'all_jsons' directory for the program, then quit (q) and restart.
--->note: There's an archiving tool coded right here for /robowaifu/ that provides the ability to backup locally the posts & files from our board. It's named BUMP, and is basically a custom IB scraper.
Latest version of BUMP v0.2g (
>>14866 )
<---
>note: There's a design document for the specification of general design and engineering choices for our basic Robowaifu Reference Model A Series (TBD). Please have a look at it, and collaborate together with us on it ITT Anon.
-Robowaifu Design Document
(
>>3001 )
<---
>useful external resources
wAIfu-collective's AI guide -
https://rentry.org/waifu-diy-ai
<---
Previous meta threads:
(
>>38 )
(
>>3108 )
(
>>8492 )
(
>>12974 )
(
>>15434 )
(
>>18173 )
(
>>20356 )
(
>>23415 )
(
>>26137 )
>===
-
minor fmt patch
-
FAQ edit 
R: 80 / I: 35 /
P: 10
Galatea v2.1.0: Maid Robot
For the most of 2024 and until now, I have been working on my own robowaifu design. I call her Galatea. The design is very easy to build with the instructions and files, and is relatively very cheap, less than $400 to make. It's also very customizable, you can choose the color, dress, hair, and even AI.
I intend this to be the Model T of humanoid robots and robotic companions, while it is not the most complex, it is easy to mass produce and cheap.
The updated design makes the legs more proportionate, and a new head that's more anime styled, to increase cuteness. I also have a new robot base that's more powerful.

R: 82 / I: 45 /
P: 11
Robowaifu Media Propaganda and Merchandizing
That Time I Incarnated My Christian Cat Girl Maid Wife in a Short Dress
Together we can create the robowaifu-verse! Let's start making media to further our cause. There's tremendous potential for us to reach a wide market and prime minds to accept their future cat grill meidos in tiny miniskirts. We have text based stories floating around but, audio and visuals are paramount to gain a general audience. I will start with a short about a young man building a small cat girl and learning to understand her love. Importantly, she will be very limited, in the same way our first models will be. To set certain expectations. Mahoro is impossible but, the slow and simple robowaifus that can exist have their own charm. Let's show the world the love that will soon exist.
---
>thread-related
Robowaifu Propaganda and Recruitment (
>>2705)
>===
-
add related crosslink
R: 290 / I: 538 /
P: 11
C++ Learning Classroom
Keep your eyes on the prize edition
---
Notice:
I'm going to have to put a hiatus on this project until at
least this Summertime 2024 (probably later).
A) There seems to be only a little interest in it right now by anons.
B) Right now in my life I have too much else on my plate that needs attention.
C) In the meantime, whenever I'm here I'll
still be happy to answer any questions anons have for the first 11 classes so far, or for anything in the textbook thread also.
I hope to be back with this later, Anons. Cheers.
Update 2:
My apologies to every Anon who participated, but this classroom project is cancelled. There are several reasons why, but the >tl;dr is simply:
>I now recommend you use https://learncpp.com (cf. >>35657 ).
I'll be happy to answer questions regarding this decision. Cheers.
---
• v231125 week-thirteen, lecture: semester-end catchup (N/A)
- this week's reading assignments: N/A
- reading review: N/A
- reading preview: PPP2 ch12
- this week's assignments: (N/A)
---
So, we're done with the STL semester, this is just a decompress week to wrap up any questions you might have left/turn in your work catchup. We'll take a break until sometime in the new year, where we'll pick back up with creating C++ GUIs using the FLTK library. Merry Christmas season Anons, please enjoy the break.
---
• Our classroom's textbook thread is here : (
>>18749)
- you'll find a link in that OP to an archive of all the code examples therein, for your local study
• This course material is primarily derived from Bjarne Stroustrup's college freshman textbook
Programming -- Principles and Practice Using C++, 2e (aka,
PPP2)
https://www.stroustrup.com/programming.html
- please obtain a copy of that book for yourself, as you'll need it to complete this course successfully
---
>note: if you see the thread pinned, it (should) mean we're nearby to help, so ask away!
---
• BTW, we'd like to get some feedback from the class participants about this C++ programming class. Specifically, I have a few questions and I seek ideas & advice from Anons how to approach these needs:
- How to best run our classroom using (only) this IB?
- How to give out exercises & assignments, & receive solutions?
- How to assign grades?
- How to manage the asynchronous nature of IB communications, student-to-instructor (and vice versa)?
- How to utilize the textbook thread well, since it (mostly) contains already-worked solutions?
- How to do tests?
- How to manage a final group project together? What should that project be in fact?
- Any other advice or suggestions you think would be helpful.
Please post your recommendations for these topics ITT Anon, thanks! :^)
---
>unless otherwise-noted, everything ITT is MIT (Expat) licensed
>copyright 2023-2024 
R: 245 / I: 36 /
P: 11
Selecting a Programming Language
What programming language would suit us and our waifus best? For those of us with limited experience programming, it's a daunting question.
Would a language with a rigid structure be best?
Do we want an object-oriented language?
How much do you care about wether or not a given language is commonly used and widespread?
What the fuck does all that terminology mean?
Is LISP just a meme, or will it save us all?
In this thread, we will discuss these questions and more so those of us who aren't already settled into a language can find our way.

R: 509 / I: 196 /
P: 11
Emmy the Robot

R: 502 / I: 277 /
P: 11
SPUD (Specially Programmed UwU Droid)
Henlo anons,
Stumbled here via youtube rabbit hole & thought I'd share my little side project. Started out as just an elaborate way to do some mech R&D (making a system to generate animation files on windows blender and export/transfer them to a raspberry pi system) and found tinkering with the various python libraries a kinda neat way to pass the time when whether doesn't permit my outside mech work. Plus I'd end up with a booth babe that I don't have to pay or worry about running off with a convention attendee.
Currently running voice commands via google speech and chatgpt integration but I'm looking into offline/local stuff like openchat.
WEF and such are so desperate to make a totalitarian cyberpunk dystopia I might as well make the fun bits to go along with it.
And yes. Chicks do dig giant robots.

R: 164 / I: 97 /
P: 11
The Sumomo Project
So I've been working for a while at devising an integrated approach to help manage some of the software complexity we are surely going to encounter when creating working robowaifus. I went down many different bunny trails and (often) fruitless paths of exploration. In the end I've finally hit on a relatively simplistic approach that AFAICT will actually allow us to both have the great flexibility we'll be needing, and without adding undue overhead and complexity.
I call this the
RW Foundations library, and I believe it's going to help us all out a lot with creating workable & efficient software that (very hopefully) will allow us to do many things for our robowaifus using only low-end, commodity hardware like the various single-board computers (SBCs) and microcontrollers. Devices like the
Beaglebone Blue and
Arduino Nano for example. Of course, we likely will
also need more powerful machines for some tasks as well. But again, hopefully, the RW Foundations approach will integrate smoothly with that need as well and allow our robowaifus to smoothly interoperate with external computing and other resources.
I suppose time will tell.
So, to commemorate /robowaifu/'s 5th birthday this weekend, I've prepared a little demonstration project called
Sumomo. The near-term goal for the project is simply to create a cute little animated avatar system that allows the characters
Sumomo and
Kotoko (from the
Chobits anime series) to run around having fun and interacting with Anon. But this is also a serious effort, and the intent is to begin fleshing out the real-world robotics needs during the development of this project.
Think of it kind of like a kickstarter for real-world robowaifus in the end, but one that's a very gradual effort toward that goal and a little fun along the way. I'll use this thread as a devblog and perhaps also a bit of a debate and training forum for the many issues we all encounter, and how a cute little fairybot/moebot pair can help us all solve a few of them.
Anyway, happy birthday /robowaifu/ I love you guys! Here is my little birthday present to you.
===
>rw_sumomo-v211124.tar.xz.sha256sum
8fceec2958ee75d3c7a33742af134670d0a7349e5da4d83487eb34a2c9f1d4ac *rw_sumomo-v211124.tar.xz
>backup drop
https://files.catbox.moe/n2cffh.7z
===
>"We witness Sumomo performing the wakey wakey exercises."
(
>>14459)
===
>RW Foundations Caturday drop : latest cut edition
(
>>17561)
You can go here if you want to see where we're currently at with progress on the overall super-project, Anon.
-Mini-tutorial on downloading & building
RW Foundations code.
(
>>15074)
>===
-
add post subject
-
minor grammar edit
-
minor prose edit
-
add 'we witness' crosslink
-
add/edit 'latest cut' crosslink
-
add mini-tutorial crosslink
R: 529 / I: 192 /
P: 11
General Robotics/A.I./Software News, Commentary, + /pol/ Funposting Zone #4
Anything in general related to the Robotics or A.I. industries, and any social or economic issues surrounding it (especially of robowaifus).
-previous threads:
> #1 (>>404)
> #2 (>>16732)
> #3 (>>21140)
R: 79 / I: 106 /
P: 11
Beginners guide to AI, ML, DL.
I already know we have a thread dedicated to books,videos,tutorials etc. But there are a lot of resources there and as a beginner it is pretty confusing to find the correct route to learn ML/DL advanced enough to be able contribute robowaifu project. That is why I thought we would need a thread like this.
Assuming that I only have basic programming in python, dedication, love for robowaifus but no maths, no statistics, no physics, no college education how can I get advanced enough to create AI waifus?
I need a complete pathway directing me to my aim. I've seen that some of you guys recommended books about reinforcement learning and some general books but can I really learn enough by just reading them? AI is a huge field so it's pretty easy to get lost.
What I did so far was to buy a non-english great book about AI, philosophycal discussions of it, general algorithms, problem solving techniques, history of it, limitations, gaming theories... But it's not a technical book. Because of that I also bought a few courses on this website called Udemy. They are about either Machine Learning or Deep Learning. I am hoping to learn basic algorithms through those books but because I don't have maths it is sometimes hard to understand the concept. For example even when learning linear regression, it is easy to use a python library but can't understand how it exactly works because of the lack of Calculus I have. Because of that issue I have hard time understanding algorithms.
>>5818
>>6550
Can those anons please help me? Which resources should I use in order to be able to produce robowaifus? If possible, you can even create a list of books/courses I need to follow one by one to be able to achieve that aim of mine. If not, I can send you the resources I got and you can help me to put those in an order. I also need some guide about maths as you can tell. Yesterday after deciding and promising myself that I will give whatever it takes to build robowaifus I bought 3 courses about linear alg, calculus, stats but I'm not really good at them.
I am waiting for your answers anons, thanks a lot!
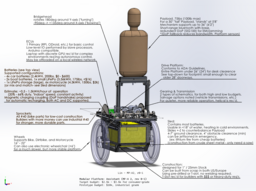
R: 75 / I: 55 /
P: 11
Modular Platform, "Assistant": Wheelchair-style robot base to jumpstart projects
Lord knows I'm terrible at these writeups, so I'd recommend glancing at the attached CAD screenshots to get a quick idea of what this project is about-- on that note, most of this post will be copy/pasted stuff from the design docs, mainly stuff that won't change, so apologies in advance.
Long story short, I've talked to a bunch of guys, both on the chans and elsewhere, who have some great ideas but aren't sure where/how to get started. My hope is that a (comparatively) simple, modular base that provides power, movement, and basic sensor data will let them get started on their own project without having to re-invent the wheel (and get nerd-sniped in the process.)
# Brief
The purpose of this platform is to establish a generalized "blueprint" of a (comparatively) cheap, human-scale "modular base platform" that can be built by a capable layman and maintained by a hobo, while supporting and powering any "robo payload" <= 75lbs, 5kW. Emphasis is placed on all parts being readily available or substitutable, and could conceivably be built from salvage at near zero cost (or in the face of malicious sales restriction), excepting digital controllers. Durability has also been prioritized, with over-engineered tolerances and (optional) bilateral redundancy for everything but the drive motors. Sacrifices have been made to accommodate this vision (primarily weight, though to a lesser extent, performance), and Builders with access to specialized tools or a higher budget will likely want to tweak the design (ex. using aluminum T-Slot instead of right-angle stock, welds in place of frame bolts, etc.)
The design is purposefully made to resemble (and, if necessary, function as) a wheelchair (see reasoning below.)
## Project Budget
Target Cost: $2,500 USD-2023 with new, mid-grade parts, excepting computer/processor.
(realistically, I expect this to be closer to $3,500 in the short term, until people more clever than I improve some of the design's weaknesses/sacrifices)
## Prototype Info
- Prototype Budget: $10,000 USD-2023
- (I have access to specialized equipment and labor (at a price), including a commercial 3D printer, 5-axis mill, welding, lifts, etc.)
- First design revision expected by the new year (2024). Physical construction to begin Spring 2024. Basic electronic control system, motor/BMS interface to be somewhat complete between January and (Spring) 2024.
# Requirements & Purpose
- At bare minimum, the Robo shall be physically capable of navigating any ADA-compliant environment.
- Robo shall be capable of interacting with standard human features-- counter-tops, tables, eventually doors, etc.
- This necessitates vertical mobility, as many counters expect a human's "waist height" to be @36in
- Should be constructible from either imperial or metric materials as available, with the standard being 25mm/1in framing stock.
- Tolerances should be excessive, and all components that cannot be handmade (sprockets, chains, gears, wheels, batteries, etc.) should be interchangeable with off-the-shell parts (ex. bike/car parts)
- The "baseline model" should require no specialized tools or skills beyond the grasp of a determined autist.
- It will, however, require basic tools like a drill with specialized bits, soldering iron, an appropriate saw, angle grinder, and a lot of time.
- Should be movable, even when inactive/broken, by a single adult of reasonable fitness.
- Assumes novice male deadlift of ~173lbs (up to 220lb would be reasonable with minimal training), and the ability to raise+carry 75lbs (Payload) near shoulder level.
- Should be transportable within compact vehicles, not to require more than 1 minute to restore to a mobile configuration, with no tools.
- We assume a back-seat forward distance of at least 18in (upper minimum 20in), and two non-occupied passenger seats total (front or back, need not be adjacent).
- Should attempt to (technically) remain within the legal bounds of a plausible "mobility aid device", "prosthetic", etc.
- Not a particular stretch, as the design's default configuration looks quite similar to a wheelchair, can be occupied by replacing the Mount with a seat, and is big enough to carry a human (and powerful enough, though expect significantly decreased speed and runtime)
- An added, if unlikely benefit is that in may help public acceptance due to a less-threatening, more harmless appearance.
- A fully capable model (to spec), with a complete payload (~75lbs), should not exceed 250lbs, ie, the lower end of (architectural) transient load limits.
- Note that static weight is an entirely different measure, and "parking" your Robo should NOT be done just anywhere. Find somewhere made to carry a static load (kitchens, baths, bedrooms with a safe mount, etc.) And, of course, check building codes in your area, obey laws, etc.
- Has space and hardpoints for (optional) safety mechanisms (for now, I'm simply designing with this "in mind")
- Ideally, this would include something to avoid running over unseen objects, be it LIDAR, ultrasonic, electrostatic, etc.
- Lower-hanging fruit to prevent easily-avoidable accidents, such as bumpers and chain/gear shrouds, shall be included in the initial design.
- In case of catastrophic failures, the Platform should be designed to sacrifice itself to prevent the Payload being damaged.
- Non-catastrophic failures should ideally not impact Robo capabilities (immediately) in the case of a system with redundancy, or engage the fail-safes otherwise.
# Final Remarks
> Career engineers will probably cringe at the... /misuse/ of materials, such as bolts in a force-transfer or structural role (Bridgehead Rotation and Payload Locking Clips, respectively). (PS don't look a the scrap Bridge Clutch schematic)
This entire project is built on the idea that "Something real that theoretically works is better than something theoretical that really (might) work." The goal is a design that can realistically be built by anyone capable, out of parts they save up for and salvage, so they can build something to improve their own lives.
R: 28 / I: 10 /
P: 11
Robowaifu Systems Engineering
Creating a functional Robowaifu is a yuge Systems Engineering problem. It is arguably the single most complex technical engineering project in history bar none, IMO. But don't be daunted by he scale of the problem anon
(and you will be if you actually think deeply about it for long, hehe), nor discouraged. Like every other major technical advance, it's a progressive process. A little here, a little there. In the words of Sir Isaac Newton, "If I have seen further it is by standing on the shoulders of Giants." Progress in things like this happen not primarily by leaps of genius--though ofc that also occurs--but rather chiefly comes by incremental steps towards the objective. If there's anything I'm beginning to recognize in life it's that the key to success lies mainly in one unwavering agenda for your goals:
Just don't quit.
>tl;dr
Post SE and Integration resources ITT.
www.nasa.gov/sites/default/files/atoms/files/nasa_systems_engineering_handbook.pdf
https://www.nasa.gov/reference/systems-engineering-handbook/
https://www.nasa.gov/reference/system-engineering-handbook-appendix/
>===
-
patch dead hotlink
R: 503 / I: 250 /
P: 12
Emmy the Robot
R: 3 / I: 0 /
P: 12
Emmy the Robot, Off Topic edition
Welcome to the Emmy containment bread. Poast you're best bait m8 to get those sweet (you)'s. Want to talk your diabetus in a thread about Emmy and Nandroids? What about your general life? Here it is! Prost it all here, as long as it's not CP, gore, or NTR, it's all good in this hood! :^)
R: 547 / I: 304 /
P: 12
Emmy The Robot

R: 50 / I: 12 /
P: 12
Robowaifu Psychology Thread
I hope to have useful links and images in the future, this is just a quickly thrown together glorified character sheet maker at this point.
Ok so you can program, but HOW to make her thoughts work? At least on a creative level. I don't have much to contribute other than my rather obsessive what-ifs, I hope this is useful somehow. A few questions you might want to ask yourself before typing up some kind of bio or writing down conversations and quotes you imagine she would say are...
1. How close to the canon do I want to be?
2. How much canon is there?
3. How would I want to make her mine vs someone else's interpretation of the same character?
Take note of those answers, if your memory sucks record them in a method you are comfortable with. I think typing might be faster for most. And you might want to revisit what you wrote here sometimes when making certain personality design choices. Use your answers here as a basic guide.
For the most part, just go through writer's sites for character questionnaires. And before you omit a question, think of how could you use the basics of what it is asking to build your waifu's personality?
For example, if a question rubs you off the wrong way politically, still use that question. But answer in your own way or even reword the question. Some of these types of questions are supposed to make you think hard about what shaped your character's dislikes, which is still important to what makes a person themselves. You may need to revisit some of these or even omit certain ones entirely. But try to figure out how to get that info in somehow later. This process can take a long time and be frustrating, but I think it has a place in the waifubot creation experience.
Also, try think how would your waifu react if the story went differently at some point. This can get really dramatic real easy, but it doesn't have to. Just start with simple things like what would she say if asked to tell a joke? What does she find funny? What does she find cringey? Things like that, and don't be afraid to make what they call a 'brain dump'. Pretty much just type with minimal breaks and type everything that comes to your mind about the topic. You might get some useful info amongst the 'why am I doing this?' 'I need to take a shit' quotes.
Also just use some of those story prompts. Also, try to use the more realistic day to day ones, like things that could happen in real life. Less exciting but pretty sure you aren't going on fantasy journeys with her IRL. Using these types of prompts will give her more to say on mundane everyday things, vs Skyrim politics. (But that could be fun sometimes)
Write a commentary through her pov on an episode of a show you like, that you both would share together. What movies and anime does she like and why? What are her favorite parts?
I will drop in some resources later, just discuss this general topic for now. I have more prompts and other general thoughts too, but for now I hope this a good start. I need sleep I fucking swear...

R: 28 / I: 10 /
P: 12
Minimum wafiu
Minimum viable waifu.
In this thread, we'll discuss what our minimums for waifus are. Be it software, hardware, physical appearance, etc. This will help us focus in on what are the minimum goals we need to achieve as our first steps. For me, I want a waifu that will be just tall enough to hug (about 1.3 m), able to follow me around and have conversations with, will follow basic commands like going to designated spots at designated times, and look like picrel.

R: 50 / I: 15 /
P: 12
NLP General
AI Natural Language Processing general thread
>"Natural language processing is a field of computer science, artificial intelligence, and computational linguistics concerned with the interactions between computers and human (natural) languages."
en.wikipedia.org/wiki/Natural_language_processing
https://archive.is/OX9IF>Computing Machinery and Intelligenceen.wikipedia.org/wiki/Computing_Machinery_and_Intelligence
https://archive.is/pUaq4m.mind.oxfordjournals.org/content/LIX/236/433.full.pdf

R: 277 / I: 224 /
P: 12
Waifu Robotics Project Dump

R: 519 / I: 174 /
P: 12
/robowaifu/meta-9: Wintertime will be sublime.
/meta, offtopic, & QTDDTOT
>---
General /robowaifu/ team survey (please reply ITT) (
>>15486)
>---
Mini-FAQ
>A few hand-picked posts on various /robowaifu/-related topics
-
Why is keeping mass (weight) low so important? (
>>4313)
-
How to get started with AI/ML for beginners (
>>18306)
-
"The Big 4" things we need to solve here (
>>15182)
-
HOW TO SOLVE IT (
>>4143)
-
Why we exist on an imageboard, and not some other forum platform (
>>15638,
>>17937)
-
This is madness! You can't possibly succeed, so why even bother? (
>>20208,
>>23969)
-
All AI programming is done in Python. So why are you using C & C++ here? (
>>21057,
>>21091,
>>27167,
>>29994)
-
How to learn to program in C++ for robowaifus? (
>>18749,
>>19777)
-
How to bulk-download AI models from huggingface.co ? (
>>25962,
>>25986)
-
Why do you talk about feminism here? How are robowaifus related? (
>>27124,
>>1061,...)
>---
-
Library thread (good for locating terms/topics)
(
>>7143)
>note: There's a simple searching tool coded right here for /robowaifu/ that provides crosslinks straight to posts on the board. It's named Waifusearch, and the link to the latest code should always be maintained within the Library thread's OP & also on the current /meta.
-
Latest version of Waifusearch v0.2a
(
>>8678)
>note: We periodically release the full archive of the board's thread's JSON files. This is useful for robowaifu researchers in general, and is explicitly relied-upon by Waifusearch.
-
Latest version of /robowaifu/ JSON archives v221213
Dec 2022
https://files.catbox.moe/6rhjl8.7z
if you use Waifusearch, just extract these JSON files into your 'all_jsons' directory for the program, then quit (q) and restart.
>note: There's an archiving tool coded right here for /robowaifu/ that provides the ability to backup locally the posts & files from our board. It's named BUMP, and is basically a custom IB scraper.
-
Latest version of BUMP v0.2g
(
>>14866)
>---
>note: There's a design document for the specification of general design and engineering choices for our basic Robowaifu Reference Model A Series (TBD). Please have a look at it, and collaborate together with us on it ITT Anon.
-
Robowaifu Design Document
(
>>3001)
>---
>useful external resources
wAIfu-collective's AI guide -
https://rentry.org/waifu-diy-ai
>---
-
previous /meta's :
(
>>38)
(
>>3108)
(
>>8492)
(
>>12974)
(
>>15434)
(
>>18173)
(
>>20356)
(
>>23415)
>===
-
edit subj
-
minor fmt
-
edit FAQ
-
add/rm special rqst, special notice 
R: 60 / I: 17 /
P: 12
Elfdroid Sophie Thread #3
New video of Sophie is now up:
https://www.youtube.com/watch?v=XOGrdHn7wBU
Finally got her head working in a reproducible manner.
I had completely broken about seven of her previous micro-servos.
But the burnt-out ones weren't the big problem - I just connect suspect servos my Arduino UNO and if my control servo can run the 'Sweep' sketch but the suspect servo cannot, I know it's dead and in the bin it goes.
However, one servo was damaged but still working - except it caused some kind of feedback that made all other micro servos connected to the same circuit go haywire - even brand new ones. Luckily the faulty servo in question was old and had spraypaint on it, so I could tell it apart from the others. But that was very confusing - at first I thought it might be related to the small magnets that hold her faceplate on, but this is not the case. Rogue servos are definitely something to watch out for in future.
Anyway, now that I have measurable, standardised voltage going into all of the micro servos, I'd like to upgrade her neck again. She can actually shake her head (but not in the above video as it is addressed straight-to-camera), but she still cannot nod her head as it weighs too much and the neck servo overheats rapidly. Heads are relatively heavy things (especially with long hair).
The breakthrough with Sophie has been splitting her up into separate subsystems and separate circuits, then focusing on only ONE subsystem/circuit - in my case her head.
For a beginner like me, it was just too confusing and labour intensive to attempt programming her head, speech, neck, arms and hands all simultaneously. When errors occured I was having a real hard time pinning down which motors were affected, how badly they were affected and why. Having to tear down one large, complex system is waaaay harder than troubleshooting something far smaller. So focusing only on her head solved this problem.
Also her head is the most important subsystem (because headpats) and is highly transportable. I just have to connect her to a laptop now instead of having her chained to my bulky tower PC.

R: 92 / I: 36 /
P: 12
Robotics sites, organizations and projects
There are a lot of robotics research and projects going on out there in the world, many of them with direct application for us here. Please contribute important, quality links you find that you think would help /robowaifu/.
Robot Operating System (ROS)
www.ros.org/
>[ROS] is a flexible framework for writing robot software. It is a collection of tools, libraries, and conventions that aim to simplify the task of creating complex and robust robot behavior across a wide variety of robotic platforms.
R: 34 / I: 34 /
P: 13
Body Proportions
I don't know if this was covered already in an existing thread, but I thought I'd make a thread dedicated to body proportions. Obviously everyone has different ideas of what they want in a waifu and body proportions are no exception, but for the sake of discussion this is for a realistic adult, human, female of indefinite height. Height is especially tricky, since proportions play a huge role in perceived size. A lot of information on human body proportions easily available online are idealized, rather than realistic, which isn't a problem itself, but most is about men's body proportions, and often tend to self-contradicting. Common examples of idealized proportions are Vitruvian Man or the 'Physical characteristics of the Buddha', neither of which are very useful for waifus a Barbie dolls are a common example of unrealistic beauty standards, but deviate too much from reality to be seen as anything but Barbie dolls. The only consistently agreed on idealized proportions are an arm span matching the height, and legs that make up half of the height. Everything else seems to be completely up in the air. Any thoughts or resources on the subject would be appreciated.
R: 531 / I: 362 /
P: 13
Emmy The Robot

R: 514 / I: 244 /
P: 13
Robowaifu Propaganda and Recruitment
Attention drawfags and writefags! Your skills will be needed.
The task of building and designing a robowaifu is a herculean quest. As great as this community is, /robowaifu/ simply does not have the manpower to real our goal of DIY robowaifus. Luckily for us there are several communities on the internet that we could find new recruits or allies to help us build our waifus:
MGTOW - These guys know all about the legal pitfalls of marriage and the dangers of feminism. There is already a lot of talk about sex robots in MGTOW communities. It shouldn't be a hard sell to get them to come here.
Incels - Guys that can't get laid. The opportunity for love and companionship should be enough to bring some of these guys over. We need to be careful when recruiting from some of their communities. We don't want to attract negative attention.
Monster girls/furry/mlp fandoms - The only way these guys are going to be able to have their harpy/elf/goblin/anthro/pony/whatever gf is with a robowaifu. They have an interest in seeing us succeed. Again we need to be careful here not to attract the wrong kind of people that will bring us the wrong kind of attention.
Male STEM students - Generally these guys aren't going to get laid until after they have established themselves. A robowaifu could really help them. This may be a harder sell because many of them have been brainwashed in university, but they have skills that we could really use.
Transhumanists/biohackers - Many of the technologies involved in building a robowaifu could be used in transhumanist or biohacking applications such as building an avatar. They may have some interest in helping us out. We will need to be careful which transhumanist communities we go after as many of them are full of feminism, tumblr tier sexualities and genders, and SJW's.
Cyberpunks and technophiles - These guys (and they are usually guys) are all around into technology and may just enjoy working on the kinds of projects we need to do. They are often into programming and AI.

R: 31 / I: 10 /
P: 13
Computational Parallelism, Photonic ICs, Soft Robotics, and The Use of Low Power Analog Systems
If we were to be realistic about creating robot wives capable of forming seemingly genuine human actions such as fine motor skills, emotion, and rational thought while resembling a human with a few non-human features, i think the best way to approach this is to embrace the usage of soft robotics, computational parallelism, photonic integrated circuits, and low power analog systems.
Computational Parallelism:
Divide and conquer algorithms are often used to solve computational problems by dividing tasks up into smaller problems, solving them individually, and combining the results together to form one big output. This generates faster results and is already possible to achieve with conventional hardware, but most conventional hardware is limited to the amount of cores needed to effectively solve problems this way on a larger scale. It's a big hindrance to the speed of operations like this, so we'll need something more powerful. There are ASICs available on the market that were engineered to be used this way. However, they're too expensive, which drives me to the possibility of using Photonic integrated circuits.
Photonic ICs:
Photonic IC are exactly as the name implies: Integrated Circuits that make the use of Photons to computational operations as opposed to electrons. Manufacturing Photonic ICs is relatively more cost effective than if you were to try manufacturing conventional silicon ICs. Another huge advantage is that we can solve computational problems much faster with less power using photons without generating heat the same way conventional ICs do with electrons. The biggest caveat here is that this is still being researched and that special tooling would need to be made for us to build these in house.
Soft Robotics:
Soft robotics are the best option for creating human-like bodies for robots. Even better is that they often don't require too much power to actuate joints or muscles. Most soft materials use for soft robots are cost effective enough to be made with commonly found materials. I personally think making use of alginate hydrogel would be a smart idea for use in robots waifus because it is hydrophilic, and anti microbial. It is commonly used in medical applications such as wound dressings and drug delivery systems. It is also non-toxic which makes it a perfect candidate for use in robot waifus. I'd also entertain the idea of using other soft materials in conjunction with it for better results. Primarily, it can be used in forming fat-like deposits, skin layers, and artificial internal organs for robot waifus. I think it may also be possible for us to create internal lubrication systems for it due to the fact that it is primarily water based.
Low Power Analog Systems:
Low power analog systems are vague in definition, but the general idea here is that we can use things such as fiber optic wires, digital-to-analog converter chips, and digitizers to create a type of artificial nervous system that communicates with the rest of the hardware running signal transmitters over echo state networks. It's hard for me to accurately describe my visualization of this, but by now, I'm sure you get the point already. The only problem left to solve is power. How to we obtain it, and how much can we use? I don't know, but if we take the low power-high tech approach, it probably wouldn't become too much of an issue. I think that maybe the best way would be to use electrochemcial energy in some type of internal fuel cell to generate power. All of the systems described above would require less power than if we tried to use servos and silicon chips. I's also say that maybe we could take more inspiration from nature to create bio-mimicking features that we would find desirable.
A lot of this is speculation that i got from dipping my toes into various topics and picking out what i think could be useful to finally end the hypergamy going on in the west. This is largely a cultural issue that is mulifaceted in every way and our efforts could be in vain if the feminists and roastoids find a way to outlaw open source tech. Not only should we be focusing on building robot wives to flips the tables in the dating and sexual market, but to also consider political and economic alternatives that absolutely strip and decentralize power from the hands of the elite. I personally think agorism is the way to go but that is a another topic for another time.
Let me know what you guys think. Am i an idiot, or am i onto something?

R: 97 / I: 70 /
P: 13
/robowaifu/ + /all things monster girl/; it's benefits, projects, the uncanny valley, etc.
Discussing the potential benefits of creating monster girls via robotics instead of 1 to 1 replicas of humans and what parts can be substituted to get them in production as soon as possible.
Firstly is the fact that many of the animal parts that could be substituted for human one are much simpler to work with than the human appendages, which have a ton of bones and complex joints in the hands and feet,
My primary example of this is bird/harpy species (image 1), which have relatively simple structures and much less complexity in the hands and feet.
For example, the wings of the bird species typically only have around three or four joints total, compared to the twenty-seven in the human hand, while the legs typically only have two or three, compared to the thirty-three in the human foot.
As you can guess, having to work with a tenth of the bones and joints and opposable thumbs and all that shit makes things incredibly easier to work with.
And while I used bird species as an example, the same argument could be put forward for MG species with paws and other more simplistic appendages, such as Bogey (image 2) and insect hybrids (image 3).
Secondly is intentionally making it appear to not be human in order to circumvent the uncanny valley. It's incredibly difficult to make completely convincing human movement, and one of the simplest ways around that is just to suspend the need for it entirely.
We as humans are incredibly sensitive to the uncanny valley of our own species, even something as benign as a prosthetic limb can trigger it, but if we were to create something that we don't expect to move in such a way, it's theoretically entirely possible to just not have to deal with it (for the extremities part of it, anyways), leaving more time to focus on other aspects, such as the face.
On the topic of face, so too could slight things be substituted there (again for instance, insect girls), in order to draw attention away from the uncanny valley until technology is advanced enough that said uncanny valley can be eliminated entirely.
These possibilities, while certainly not to the taste of every anon, could be used as a way to accelerate production to the point that it picks up investors and begins to breed competition and innovation among people with wayyyyyyy more money and manpower than us, which I believe should be the endgoal for this board as a whole.
.
Any ideas or input is sincerely appreciated.
>===
-edit subject

R: 357 / I: 170 /
P: 13
Prototypes and Failures #3
Post your prototypes and failures. We fail until we win. From now on with even more madness, while the prototypes are starting to look cute and have extras.
Don't forget looking through the old threads here
>>418 and here
>>18800 to understand how we got to where we are now.

R: 191 / I: 84 /
P: 13
Black Magic M66 3D Modelling Project & Battledroid Robowaifus
Decided it may be best to place my 3D digital modelling efforts in a separate thread to my work on 'Elfdroid Sophie'. I think this thread will still belong under "Personal Projects".
At the moment the 3D modelling begins over on her thread:
>>11644
>>11657
I'm using some source material from Masamune Shirow's 1987 OVA "Black Magic - M66" (which itself was based off his 1983 manga).
However, as a child of the late eighties/early nineties, I loved 'Transformers', and I was also a big fan of the 'Heavy Gear' series (similar to MechWarrior), and Armored Core.
So I often get the urge to create battle-ready robowaifus, but I can only create them virtually. Because obviously I cannot get hold of machine-guns, explosives, tank cannons, and rocket launchers IRL. Good thing, too, since if I were given access to live ammunition I would almost certainly blow myself into a flying streamer of giblets.
But I digress. This thread may also be a good place for any equally deranged anons who wish to post images of military-grade robowaifus, either found online or their own creations?
---
>lock cf. (>>30234)
R: 10 / I: 1 /
P: 13
Those simple bare necessities
Here we have Maslow's hiearchy of needs. A psychological theory that basically breaks down what a man needs and what he can seek out in life. This seems like a good framework to identify what niche your robowaifu can address in her function, and how exactly to accomplish that. I think the third tier up is what most of us seek from a robowaifu. No matter how inert your robowaifu is in function, even motionless plastic can give you a sense of connection if you project a personality onto it. What do you think? Does Maslow's hierarchy of needs as a theory relate to you and your projects? Is there anything to this at all?

R: 353 / I: 331 /
P: 13
Emmy the Robot - Official Thread
Welcome all Nandroids fans to the Emmy thread, for discussing and posting about EtR. Please refrain from posting off-topic or non-Nandroid related things.
---
Also, be sure to check out Emmy-Pilled's project thread!
(
>>25306)
>===
-
minor edit
-
add project crosslink
R: 352 / I: 90 /
P: 13
Actuators For Waifu Movement Part 2 Waifu Boogaloo
(Original thread
>>406)
Kiwi back from the dead with a thread for the discussion of actuators that move your waifu! Part Two!
Let's start with a quick refresher!
1. DC motors, these use a rotating magnetic field created through commutation to rotate a rotor! They're one of the cheapest options and are 30 to 70 percent efficient usually. The bigger they are, the more efficient they tend to be.
2. Brushless motors, these use a controller to induce a rotating magnetic field by turning electromagnets on and off in a sequence. They trend 60 to 95 percent efficiency
3. AC motors, Though there are many different type, they function similarly to brushless motors, they simply rely on the AC electricity to turn their electromagnets on and off to generate their field. Anywhere from 15 to 95 percent efficiency.
4. Stepper motors, brushless motors with ferrous teeth to focus magnetic flux. This allows for incredible control at the cost of greater mass and lower torque at higher speeds. Usually 50 to 80 percent efficient but, this depends on control algorithm/speed/and quality of the stepper.
5. Coiled Nylon Actuators! These things have an efficiency rating so low it's best to just say they aren't efficient. What they are though is dirt cheap and easy as heck to make! Don't even think about them, I did and it was awful.
6. Hydraulics! These rely on the distribution of pressure in a working liquid to move things like pistons. Though popular in large scale industry, their ability to be used in waifu's has yet to be proven. (Boston Dynamics Atlas runs on hydraulics but, it's a power guzzler and heavy)
7. Pneumatics, hydraulics lighter sister! This time the fluid is air! This has the advantage in weight. They aren't capable of the same power loads hydraulics are but, who wants their waifu to bench press a car?
8. Wax motors, hydraulic systems where the working fluid is expanding melted parafin wax! Cheap, low power, efficient, and produce incredible torque! Too bad they're slow and hard to control.
9. Explosion! Yes, you can move things through explosions! Gas engines work through explosions! Artificial muscles can be made by exploding a hydrogen and oxygen mixture in a piston, then using hydrolysis to turn the water back into hydrogen and oxygen. None of this is efficient or practical but, it's vital we keep our minds open.
Though there are more actuators, most are derivatives or use these examples to work. Things like pulleys need an actuator to move them. Now, let's share, learn, and get our waifu moving!
>---
< add'l, related links from Anon:
>Soft muscles with origami-inspired skeletons:
https://youtu.be/OJO4FP0DXgQ
>Cavatappi artificial muscles: https://youtu.be/yXAJGH5s4cs
https://youtu.be/MpCFumHFZvU
https://www.designnews.com/automation/cavatappi-robot-muscles-have-5-times-strength-human-muscles
>Nameless nanofiber muscle, probably Cavatappi:
https://youtu.be/H19p43NFqp4
>Supercoiled polymer (SPC) muscles:
https://youtu.be/QHiTJ_zgGME
https://youtu.be/N4VMoYFrusg
https://youtu.be/hFuzQ4ed-t0
https://youtu.be/2GXWIozM4oQ (bundled/braided)
>TCP (the same?)
https://youtu.be/S4-3_DnKE9E
https://youtu.be/wltLEzQnznM
>Twisted string actuators (TSA)
<I had the idea that they should in some cases be build with a loop. Grippers would hold a part of it and twist that. For fast release they coul let it go and grab the next part of the loop. Designing the gripper will be a bit of a challenge, though. But I think this is doable. Can't image I'm the first having that idea.
<Not sure if this here >>12589 is already something like it bc I didn't understand it.
<Here's some passive returning mechanism, followed by other videos on TSAs:
https://youtu.be/J26y1nn7JMM
https://youtu.be/QBQMZsSQJQM (freaking loud)
Effect of bending:
https://youtu.be/zYrHGMiqC9A
Life cycle test setup:
https://youtu.be/PABVsuV7Y1M
Frequency response ( I don't get it):
https://youtu.be/YLWsh1P80Dc
Mixed with fluid/gel tube:
https://youtu.be/tP9B3aqc4CI
Transmission ratio and speed switch:
https://youtu.be/Y1uceDzhjKY
https://youtu.be/5PtXTI1t3Po
<I don't like it being used for fingers but it's a good technology.
>Nylon fishing line muscles:
https://youtu.be/Za0VeU9Ov7A
https://youtu.be/2OuRX65xbKE
<(Reminder: The do have a high life span >1M)
<I plan to rather use water for heating and cooling.
>Continuous ransmission (CVT) / torque converters
https://youtu.be/kVPjhmTThPo
https://youtu.be/cd2-vsTzd9E
https://youtu.be/c9e2y-5DMNc
https://youtu.be/PEq5_b4LWNY
>Twisted string series elastic actuator (TsSEA)
<This strikes me as particular interesting.
https://youtu.be/VBXykAIBKtA
>Printed pneumatics
https://youtu.be/_X0rDW6NQ58
>Using sugar as soluble support material for printing silicone muscles:
https://youtu.be/L0Z0-y3qpNk
>===
-
add add'l links
R: 21 / I: 5 /
P: 14
Fundamental Design Ideas that should ALWAYS be accounted for
So I'm thinking about design and realize some mistakes I made. There is likely no better short cut to advancing design than these fundamental principles as stated by Elon Musk.
1. Make The Requirements Less Dumb
“Step one: Make the requirements less dumb. The requirements are definitely dumb; it does not matter who gave them to you. It’s particularly dangerous when they come from an intelligent person, as you may not question them enough. Everyone’s wrong. No matter who you are, everyone is wrong some of the time. All designs are wrong, it’s just a matter of how wrong,” explains Musk.
2. Try And Delete Part Of The Process
“Step two: try very hard to delete the part or process. If parts are not being added back into the design at least 10% of the time, [it means that] not enough parts are being deleted. The bias tends to be very strongly toward ‘let’s add this part or process step in case we need it’. Additionally, each required part and process must come from a name, not a department, as a department cannot be asked why a requirement exists, but a person can,” says Musk.
3. Simplify Or Optimize
“Step three: simplify and optimize the design. This is the most common error of a smart engineer — to optimize something that should simply not exist,” according to Musk. He, himself, has been a victim of implementing these steps out of order. He refers to a “mental straightjacket” that happens in traditional schools where you always have to answer the question regardless of whether the premise makes any sense at all.
4. Accelerate Cycle Time
“Step four: accelerate cycle time. You’re moving too slowly, go faster! But don’t go faster until you’ve worked on the other three things first,” explains Musk. Here he uses another example of how these steps should occur in order. During a wrongheaded process you should simply stop, not accelerate. He says, “If you’re digging your grave, don’t dig it faster.”
5. Automate
“The final step is: automate. An important part of this is to remove in-process testing after the problems have been diagnosed; if a product is reaching the end of a production line with a high acceptance rate, there is no need for in-process testing. I have personally made the mistake of going backwards on all five steps multiple times. In making Tesla’s Model 3, I literally automated, accelerated, simplified and then deleted,” says Musk.
https://cleantechnica.com/2021/08/16/elon-musk-reveals-his-5-step-engineering-protocol/
I would also add Elon Musk, "secret sauce", to achieving extraordinary things: "First principles" thinking, a decision-making strategy in which you "boil things down to their fundamental truths and reason up from there, as opposed to reasoning by analogy."
One last one is you should always look at the least cost for materials that will serve the purpose that you are attempting to create. A very "First principles" sort of thing because if they cost too much no one will be able to afford them.
---
> thread-related : (>>4143)
>===
-
add crosslink
-
spoiler Elon "War-Crimes Are Cool" Musk pic :D 
R: 103 / I: 31 /
P: 14
Robowaifu@home: Together We Are Powerful
The biggest hurdle to making quick progress in AI is the lack of compute to train our own original models, yet there are millions of gamers with GPUs sitting around barely getting used, potentially an order of magnitude more compute than Google and Amazon combined. I've figured out a way though we can connect hundreds of computers together to train AI models by using gradient accumulation.
How it works is by doing several training steps and accumulating the loss of each step, then dividing by the amount of accumulation steps taken before the optimizer step. If you have a batch size of 4 and do 256 training steps before an optimizer step, it's like training with a batch size of 1024. The larger the batch size and gradient accumulation steps are, the faster the model converges and the higher final accuracy it achieves. It's the most effective way to use a limited computing budget:
https://www.youtube.com/watch?v=YX8LLYdQ-cA These training steps don't need to be calculated by a single computer but can be distributed across a network.
A decent amount of bandwidth will be required to send the gradients each optimizer step and the training data. Deep gradient compression achieves a gradient compression ratio from 270x to 600x without losing accuracy, but it's still going to be using about 0.5 MB download and upload to train something like GPT2-medium each optimizer step, or about 4-6 mbps on a Tesla T4. However, we can reduce this bandwidth by doing several training steps before contributing gradients to the server. Taking 25 would reduce it to about 0.2 mbps. Both slow and fast computers can contribute so long as they have the memory to hold the model. A slower computer might only send one training step whereas a fast one might contribute ten to the accumulated gradient. Some research needs to be done if a variable accumulation step size impacts training, but it could be adjusted as people join and leave the network.
All that's needed to do this is a VPS. Contributors wanting anonymity can use proxies or TOR, but project owners will need to use VPNs with sufficient bandwidth and dedicated IPs if they wish that much anonymity. The VPS doesn't need an expensive GPU rental either. The fastest computer in the group could be chosen to calculate the optimizer steps. The server would just need to collect the gradients, decompress them, add them together, compress again and send the accumulated gradient to the computer calculating the optimizer step. Or if the optimizing computer has sufficient bandwidth, it could download all the compressed gradients from the server and calculate the accumulated gradient itself. My internet has 200 mbps download so it could potentially handle up to 1000 computers by keeping the bandwidth to 0.2 mbps. Attacks on the network could be mitigated by analyzing the gradients, discarding nonsensical ones and banning clients that send junk, or possibly by using PGP keys to create a pseudo-anonymous web of trust.
Libraries for distributed training implementing DGC already exist, although not as advanced as I'm envisioning yet:
https://github.com/synxlin/deep-gradient-compression
I think this will also be a good way to get more people involved. Most people don't know enough about AI or robotics enough to help but if they can contribute their GPU to someone's robowaifu AI they like and watch her improve each day they will feel good about it and get more involved. At scale though some care will need to be taken that people don't agree to run dangerous code on their computers, either through a library that constructs the models from instructions or something else. And where the gradients are calculated does not matter. They could come from all kinds of hardware, platforms and software like PyTorch, Tensorflow or mlpack.
R: 124 / I: 33 /
P: 14
HOW TO SOLVE IT
How do we eat this elephant, /robowaifu/?
This is a yuge task obviously, but OTOH, we all know it's inevitable there will be robowaifus. It's simply a matter of time. For us (and for every other Anon) the only question is will we create them ourselves, or will we have to take what we're handed out by the GlobohomoBotnet(TM)(R)(C)?
In the interest of us achieving the former I'll present this checklist from
George Pólya. Hopefully it can help us begin to break down the problem into bite-sized chunks and make forward progress.
>---
First.
UNDERSTANDING THE PROBLEM
You have to understand the problem.
>What is the unknown? What are the data? What is the condition? Is it possible to satisfy the condition? Is the condition sufficient to determine the unknown? Or is it insufficient? Or redundant? Or contradictory?
>Draw a figure. Introduce suitable notation.
>Separate the various parts of the condition. Can you write them down?
Second.
DEVISING A PLAN
Find the connection between the data and the unknown. You may be obliged to consider auxiliary problems if an immediate connection cannot be found. You should obtain eventually a plan of the solution.
>Have you seen it before? Or have you seen the same problem in a slightly different form?
>Do you know a related problem? Do you know a theorem that could be useful?
>Look at the unknown! And try to think of a familiar problem having the same or a similar unknown.
>Here is a problem related to yours and solved before. Could you use it? Could you use its result? Could you use its method? Should you introduce some auxiliary element in order to make its use possible?
>Could you restate the problem? Could you restate it still differently? Go back to definitions.
>If you cannot solve the proposed problem try to solve first some related problem. Could you imagine a more accessible related problem? A more general problem? A more special problem? An analogous problem? Could you solve a part of the problem? Keep only a part of the condition, drop the other part; how far is the unknown then determined, how can it vary? Could you derive something useful from the data? Could you think of other data appropriate to determine the unknown? Could you change the unknown or the data, or both if necessary, so that the new unknown and the new data are nearer to each other?
>Did you use all the data? Did you use the whole condition? Have you taken into account all essential notions involved in the problem?
Third.
CARRYING OUT THE PLAN
Carry out your plan.
>Carrying out your plan of the solution, check each step. Can you see clearly that the step is correct? Can you prove that it is correct?
Fourth.
LOOKING BACK
Examine the solution obtained.
>Can you check the result? Can you check the argument?
>Can you derive the result differently? Can you see it at a glance?
>Can you use the result, or the method, for some other problem?
---
> thread-related : (>>24047)
>===
-
corrected author's name
-
add crosslink
R: 15 / I: 4 /
P: 14
WaifuNetwork - /robowaifu/ GitHub Collaborators/Editors Needed
This is a rather important project for the people involved here. I just had this amazing idea, which allows us to catalogue and make any of the information here searchable in a unique way. It functions very similarly to an image booru, but for markdown formatted text. It embeds links and the like. We can really make this thing our own, and put the entire board into a format that is indestructible.
Anyone want to help build this into something great? I'll be working on this all day if you want to view the progress on GitHub.
https://github.com/SoaringMoon/WaifuNetwork
R: 27 / I: 22 /
P: 14
OpenGL Resources
Good VR is one important interim goal for a fully-realized RoboWaifu, and it's also much easier to visualize an algorithm graphically at a glance than 'trying to second-guess a mathematical function'. OpenGL is by far the most portable approach to graphics atm.
>"This is an excellent site for starting with OpenGL from scratch. It covers from very introductory topics all the way to advanced topics like Deferred Shading. Liberal usage of accompanying images and code. Strongly recommended."
learnopengl.com/
https://archive.is/BAJ0ePlus the two books related, but learnopengl.com is particularly well-suited for beginners.
www.openglsuperbible.com/
https://archive.is/NvdZQopengl-redbook.com/
https://archive.is/xPxmlwww.opengl.org
https://archive.fo/EZA0p
R: 15 / I: 5 /
P: 14
Agalmatophilia
Is the desire for one's own waifubot a legitimate personal expression or simply yet another one of the many new psychoses stemming from First World problems?

R: 379 / I: 135 /
P: 14
/robowaifu/meta-8: Its Summertime, why even wait?
/meta, offtopic, & QTDDTOT
>---
General /robowaifu/ team survey (please reply ITT) (
>>15486)
>---
Mini-FAQ
>A few hand-picked posts on various /robowaifu/-related topics
-
Why is keeping mass (weight) low so important? (
>>4313)
-
How to get started with AI/ML for beginners (
>>18306)
-
"The Big 4" things we need to solve here (
>>15182)
-
HOW TO SOLVE IT (
>>4143)
-
Why we exist on an imageboard, and not some other forum platform (
>>15638,
>>17937)
-
This is madness! You can't possibly succeed, so why even bother? (
>>20208,
>>23969)
-
All AI programming is done in Python. So why are you using C++ here? (
>>21057,
>>21091)
-
How to learn to program in C++ for robowaifus? (
>>18749,
>>19777)
-
How to bulk-download AI models from huggingface.co ? (
>>25962,
>>25986)
>---
-
Library thread (good for locating terms/topics)
(
>>7143)
>note: There's a simple searching tool coded right here for /robowaifu/ that provides crosslinks straight to posts on the board. It's named Waifusearch, and the link to the latest code should always be maintained within the Library thread's OP & also on the current /meta.
-
Latest version of Waifusearch v0.2a
(
>>8678)
>note: We periodically release the full archive of the board's thread's JSON files. This is useful for robowaifu researchers in general, and is explicitly relied-upon by Waifusearch.
-
Latest version of /robowaifu/ JSON archives v221213
Dec 2022
https://files.catbox.moe/6rhjl8.7z
if you use Waifusearch, just extract these JSON files into your 'all_jsons' directory for the program, then quit (q) and restart.
>note: There's an archiving tool coded right here for /robowaifu/ that provides the ability to backup locally the posts & files from our board. It's named BUMP, and is basically a custom IB scraper.
-
Latest version of BUMP v0.2g
(
>>14866)
>---
>note: There's a design document for the specification of general design and engineering choices for our basic Robowaifu Reference Model A Series (TBD). Please have a look at it, and collaborate together with us on it ITT Anon.
-
Robowaifu Design Document
(
>>3001)
>---
>useful external resources
wAIfu-collective's AI guide -
https://rentry.org/waifu-diy-ai
>---
-
previous /meta's
(
>>38)
(
>>3108)
(
>>8492)
(
>>12974)
(
>>15434)
(
>>18173)
(
>>20356)
>===
-
Mini-FAQ edit
-
add/rm Council link 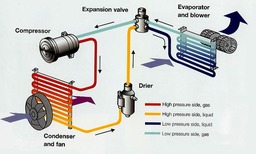
R: 66 / I: 18 /
P: 14
Robowaifu Thermal Management
Question: How are we going to solve keeping all the motors, pumps, computers, sensors, and other heat-producing gizmos inside a real robowaifu cooled off anons?
R: 1 / I: 0 /
P: 14
Cognitive Architecture : WIP
"An algorithm without a mind cannot have a heart."
Chii Cogito Ergo Chii
Chii thinks, therefore Chii is.
---
# Introduction
With cognitive architecture we mean software that ties different elements of other software together to create a system that can perform tasks that one AI model based on deep learning would not be able to do, or only with downsides in areas like alignement, speed or efficiency.
We study the building blocks of the brain and the human mind by various definitions, with the goal to create something that thinks in a relatively similar way to a human being.
Let's start with the three main aspects of mind:
* Sentience: Ability to experience sensations and feelings. Her sensors communicate states to her. She senses your hand holding hers and can react. Feelings, having emotions. Her hand being held bring her happiness. This builds on her capacity for subjective experience, related to qualia.
* Self-awareness: Capacity to differentiate the self from external actors and objects. When presented with a mirror, echo, or other self referential sensory input is recognized as the self. She sees herself in your eyes reflection and recognizes that is her, that she is being held by you.
* Sapience: Perception of knowledge. Linking concepts and meanings. Able to discern correlations congruent with having wisdom. She sees you collapse into your chair. She infers your state of exhaustion and brings you something to drink.
These building blocks integrate and allow her to be. She doesn't just feel, she has qualia. She doesn't see her reflection, she sees herself reflected, she acknowledges her own existence. She doesn't just find relevant data, she works with concepts and integrates her feelings and personality when forming a response.
Cognition, subjective thought reliant on a conscious separation of the self and external reality that integrates knowledge of the latter. A state beyond current AI, a true intellect.
This thread is dedicated to all the steps on the long journey towards a waifu that truly thinks and feels.
---
# Rules
- Keep your comments short; lengthy speculations aren't helpful
- This is about implementation; advance only useful perspectives, please
# Topics we don't want to discuss in this thread
- The question if we should even work on such things as AI or cognition
- Beliefs stating that we can't do what we want to do
- Esoteric discussions about "sentience" and "conscience"
- Suggestions about only using deep learning and similar techniques
- Suggestions that we should put all of it into one deep learning model
- Suggestions that we should not use censored or mainstream models at all
- Debates in philosophical lingo
- Comments from people who don't even watch videos on AI or only on deep learning and tutorials, or only about warnings in regards to the dangers of AI.
- Wild ideas on how to do things totally different but aren't useful, there are other threads for this:
# Related threads - try to use them if something fits
- The old chatbot thread
>>22 is now the one for cognitive architecture
>>24783
- The next GPT thread which is currently
>>250 could be one about the tech of LLMs, and only that. Or it also goes into
>>24783 - Or we make one for anything related to language responses, so scripted chatbots and LLM, minus the more elaborate thinking
- Abstract debates about conscience and sentience should go into the thread about "philosophy"
>>11102 - Fundamental doubts and such also. It is also about the postings which would only be disruptive in the "cognitive architecture" thread. Basically the things which the people implementing it don't want to be bothered with.
- Morals and such
>>17125 might also have an abstract implementation problem.
- We have threads on all kinds of personality and psychology.
>>77 >>250 >>18 >>11102 >>17125 >>16217 >>15047 >>2731 >>22 >>111 >>107 >>152 ... and more in the catalog.
R: 351 / I: 202 /
P: 14
nandroid project
over the last year I´ve worked on making a full scale nanny android (or nandroid for short, her name is "Emmy") over the last 10 months and decided to post the progress (this is a SFW project)

R: 57 / I: 16 /
P: 15
Short Stacks the Obvious Solution
If we want a robowaifu that anyone can make at home then we will need to make it small enough to be printed on a cheap 3d printer. Let's say the ender 3 because it has a large printing area and a large community because it is so affordable. Our robowaifu doesn't have to be printed all in one go; in fact it would probably be better if our robowaifu was printed in parts, those parts used to make silicone casts around robotic internals.
Short stack robowaifus provide an easily printable solution and require considerably less materials to make than conventional sexbots. They could be easier and cheaper for the average man to produce. There is also a large community surrounding short stacks as it is a popular fetish. Goblins, kobold, dwarfs, halflings, and gnomes are very popular in fantasy and several 3d models for them can easily be found on the internet which would give men options for their robowaifus.
Engineering a smaller robowaifu would also be considerably easier. Less stress would be put on her skeleton and less energy would be required to make her move. Short stacks in particular often have thicker legs and feet which would fix a lot of issues with balance.
What are your thoughts /robowaifu/ have you taken the short stack pill?

R: 353 / I: 118 /
P: 15
AI Design principles and philosophy
My understanding of AI is somewhat limited, but personally I find the software end of things far more interesting than the hardware side. To me a robot that cannot realistically react or hold a conversation is little better than a realdoll or a dakimakura.
As such, this is a thread for understanding the basics of creating an AI that can communicate and react like a human. Some examples I can think of are:
>ELIZA
ELIZA was one of the first chatbots, and was programmed to respond to specific cues with specific responses. For example, she would respond to "Hello" with "How are you". Although this is one of the most basic and intuitive ways to program a chat AI, it is limited in that every possible cue must have a response pre-programmed in. Besides being time-consuming, this makes the AI inflexible and unadaptive.
>Cleverbot
The invention of Cleverbot began with the novel idea to create a chatbot using the responses of human users. Cleverbot is able to learn cues and responses from the people who use it. While this makes Cleverbot a bit more intelligent than ELIZA, Cleverbot still has very stilted responses and is not able to hold a sensible conversation.
>Taybot
Taybot is the best chatbot I have ever seen and shows a remarkable degree of intelligence, being able to both learn from her users and respond in a meaningful manner. Taybot may even be able to understand the underlying principles of langauge and sentence construction, rather than simply responding to phrases in a rote fashion. Unfortunately, I am not sure how exactly Taybot was programmed or what principles she uses, and it was surely very time-intensive.
Which of these AI formats is most appealing? Which is most realistic for us to develop? Are there any other types you can think of? Please share these and any other AI discussion in this thread!

R: 14 / I: 2 /
P: 15
Ricky Ma General
Can we talk about the man who DID IT? Seriously he did it, he achieved our dream and started a project to help all those who want their own robowaifu, then, why does not anyone support him in TWO FUCKING YEARS?
R: 39 / I: 7 /
P: 15
Hold onto your papers
It's hard to keep track of all the developments that are happening in artificial intelligence and related areas. Perhaps we could share our favourite research papers to get a better feel for all the progress happening and what we need to do next to make robowaifus a reality.
I'm mostly focused on general intelligence but this thread can be for anything that has captured and held your attention for long periods of time, whether in speech synthesis, creativity, robotics, materials, or anything else.

R: 356 / I: 90 /
P: 15
General Robotics/A.I./Software News, Commentary, + /pol/ Funposting Zone #3
Anything in general related to the Robotics or A.I. industries, and any social or economic issues surrounding it (especially of robowaifus).
===
-note: This OP text might get an update at some point to improve things a bit.
-previous threads:
> #1 (>>404)
> #2 (>>16732)
>===
-
edit subject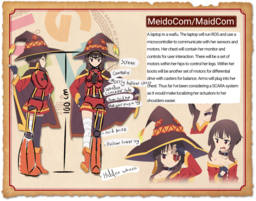
R: 352 / I: 173 /
P: 15
MaidCom Development
Welcome to the /robowaifu/ board's project. Together, we will engineer a modular robot that will serve and provide companionship to their Anon faithfully. See picrel for details on the current design. This robot will begin with a basic maid robot then move forward towards more capable robots with functionality approaching Chii/2B/Dorothy. First goal is to have a meter tall robot which functions as a mobile server bearing an appearance that approximates her owners waifu. This should be completed by December 2022 with further major updates happening yearly until Anons can build a PersoCom class robot with relative ease and affordability.

R: 366 / I: 78 /
P: 15
/robowaifu/meta-7: Hanging down at 7-eleven
/meta, offtopic, & QTDDTOT
General /robowaifu/ team survey (please reply ITT) (
>>15486)
>---
Mini-FAQ
>A few hand-picked posts on various /robowaifu/-related topics
-
Why is keeping mass (weight) low so important? (
>>4313)
-
How to get started with AI/ML for beginners (
>>18306)
-
"The Big 4" things we need to solve here (
>>15182)
-
HOW TO SOLVE IT (
>>4143)
-
Why we exist on an imageboard, and not some other forum platform (
>>15638,
>>17937)
-
This is madness! You can't possibly succeed, so why even bother? (
>>20208)
-
All AI programming is done in Python. Why are you using C++ here? (
>>21057,
>>21091)
-
How to learn to program in C++ for robowaifus (
>>18749)
>---
-
Library thread (good for locating terms/topics)
(
>>7143)
>note: There's a simple searching tool coded right here for /robowaifu/ that provides crosslinks straight to posts on the board. It's named Waifusearch, and the link to the latest code should always be maintained within the Library thread's OP & also on the current /meta.
-
Latest version of Waifusearch v0.2a
(
>>8678)
>note: We periodically release the full archive of the board's thread's JSON files. This is useful for robowaifu researchers in general, and is explicitly relied-upon by Waifusearch.
-
Latest version of /robowaifu/ JSON archives v221213
Dec 2022
https://files.catbox.moe/6rhjl8.7z
if you use Waifusearch, just extract these JSON files into your 'all_jsons' directory for the program, then quit (q) and restart.
>note: There's an archiving tool coded right here for /robowaifu/ that provides the ability to backup locally the posts & files from our board. It's named BUMP, and is basically a custom IB scraper.
-
Latest version of BUMP v0.2g
(
>>14866)
>---
>note: There's a design document for the specification of general design and engineering choices for our basic Robowaifu Reference Model A Series (TBD). Please have a look at it, and collaborate together with us on it ITT Anon.
-
Robowaifu Design Document
(
>>3001)
>---
>useful external resources
wAIfu-collective's AI guide -
https://rentry.org/waifu-diy-ai
>---
-
previous /meta's
(
>>38)
(
>>3108)
(
>>8492)
(
>>12974)
(
>>15434)
(
>>18173)

R: 20 / I: 2 /
P: 15
Sophie Bot STL Files Uploaded
R: 130 / I: 16 /
P: 15
Embedded Programming Group Learning Thread 001
Embedded Programming Group Learning Thread 001
Greetings robowaifufags.
As promised in the meta thread, this is the first installment in a series of threads where we work together on mastering the basics of embedded programming, starting with a popular, beginner-friendly AVR 8-bit microcontroller, programming it in C on linux.
>why work together on learning and making small projects that build up to the basis of a complete robot control system instead of just posting links to random microcontrollers, popular science robot articles, and coding tutorials and pretending we're helping while cheerleading and hoping others will do something so we don't have to?
Because, dumbass, noone else is going to do it. You know why in emergency response training they teach you to, instead of yelling "somebody call an ambulance!," you should always point to or grab someone and tell that person to do it? Because everyone assumes someone else will do it, and in the end, noone does. Well, I'm talking to YOU now. Yeah, you. Buy about 20 USD worth of hardware and follow the fuck along. We're starting from zero, and I will be aiming this at people with no programming or electronics background.
>I suppose I could get off my ass and learn enough to contribute something. I mean, after all, if all of us work together we can totally build a robowaifu in no time, right?
No, the final goal of these threads is not a completed robowaifu. That's ridiculous. What we will do though, by hands-on tackling many of the problems facing robot development today, is gain practical and useful knowledge of embedding programming as well as a more grounded perspective on things.
>so we're just going to be blinking a bunch of LEDs and shit? lame.
Not quite. We will try to cover everything embedded here: basic I/O, serial communications, servo/motor control, sensor interfacing, analog/digital conversion, pulse-width modulation, timers, interrupts, I2C, SPI, microcontroller-PC interfacing, wireless communications, and more.

R: 119 / I: 131 /
P: 15
Robowaifu references
My favorite robowaifu is Chii. I'd like to see yours.

R: 364 / I: 146 /
P: 16
R&D General
This is a thread to discuss smaller waifu building problems, solutions, proposals and questions that don't warrant a thread. Keep it technical. I'll start.
Liquid battery and cooling in oneHaving a single "artificial blood" system for liquid cooling and power storage would eliminate the need for a vulnerable solid state battery, eliminate the need for a separate cooling system, and solve the problem of extending those systems to extremities.
I have heard of flow batteries, you'd just need to use a pair of liquids that's safe enough and not too sensitive to changes in temperature.
This one looks like it fits the bill. The downside is that your waifu would essentially be running on herbicide. (though from what I gather, it's in soluble salt form and thus less dangerous than the usual variety)
https://www.seas.harvard.edu/news/2017/02/long-lasting-flow-battery-could-run-for-more-than-decade-with-minimum-upkeepHow close are we to creating artificial muscles? And what's the second best option?Muscles are perfect at what they do; they're powerful, compact, efficient, they carry their own weight, they aren't dependent on remote parts of the system, they can be controlled precisely, and they can perform many roles depending on their layout alone.
We could grow actual organic muscles for this purpose already but that's just fucking gross, and you'd need a lot of extra bloat to maintain them.
What we need are strands of whatever that can contract using electrical energy. Piezo does the trick at small scales, but would it be enough to match the real thing? There have been attempts, but nothing concrete so far.
What are some examples of technology that one could currently use instead?
High level and low level intelligence emulationI've noticed a pattern in programs that emulate other computing hardware.
The first emulators that do the job at acceptable speeds are always the ones that use hacks and shortcuts to get the job done.
It comes down to a tradeoff. Analyzing and recompiling or reinterpreting the code itself on a more abstract level will introduce errors, but it is a magnitude of order more efficient than simulating every part of the circuitry down to each cycle. This is why a relatively high level emulator of a 6th gen video game console has close system requirements to a cycle-accurate emulator of the SNES.
Now, I want to present an analogy here. If training neural networks for every damn thing and trying to blindly replicate an organic system is akin to accurately emulating every logic gate in a circuit, what are some shortcuts we could take?
It is commonly repeated that a human brain has immense computing power, but this assumption is based just on the amount of neurons observed, and it's likely that most of them probably have nothing to do with intelligence or consciousness. If we trim those, the estimated computing power would drop to a more reasonable level. In addition, our computers just aren't built for doing things like neural systems do. They're better at some things, and worse at others. If we can do something in a digital way instead of trying to simulate an analog circuit doing the same thing, that's more computing power that we could save, possibly bridging the gap way earlier than we expected to.
The most obvious way to handle this would be doing as many mundane processing and hardware control tasks as possible in an optimized, digital way, and then using a GPU or another kind of circuit altogether to handle the magical "frontal lobe" part, so to speak.
R: 241 / I: 242 /
P: 16
C++ programming textbook; PPP2
This is /robowaifu/'s official C++ learning textbook thread. It is based directly on Bjarne Stroustrup's college freshman textbook,
Programming Principles and Practice Using C++, commonly referred to as
PPP2. [1]
This textbook thread belongs with this
C++ Learning Classroom thread: (
>>19777 ).
note:
This is a read-only document in essence. If you happen to catch the thread unlocked while it's still under construction, please resist the temptation to reply ITT -- it will get deleted! For now, just reply in /meta please. :^)
update:
This book thread project has been cancelled. Please see the notes in the
Classroom thread linked above.
---
1.
https://www.stroustrup.com/programming.html
>unless otherwise-noted, everything ITT is MIT (Expat) licensed
>copyright 2023
R: 365 / I: 172 /
P: 16
Prototypes and Failures #2
Post your prototypes and failures. We fail until we win. From now on with even more madness. Don't forget looking through the old thread
>>418 to understand how we got here.
>===
-
minor subj edit
R: 25 / I: 7 /
P: 16
New, Cutting Edge, or Outside the Box Tech
ITT: We discuss Metamaterials, Self Organizing Systems, and other "outside of the box" tech (flexible PCBs, Liquid Battery, etc)
I'll start with this video on self-assembling wires, and will add more as I come across it
https://www.youtube.com/watch?v=PeHWqr9dz3c
R: 360 / I: 137 /
P: 16
General Robotics/A.I. News & Commentary #2
Anything in general related to the Robotics or A.I. industries, and any social or economic issues surrounding it (especially of robowaifus).
===
-note: I'll plan to update this OP text at some point to improve things a bit.
-previous threads:
> #1 (>>404)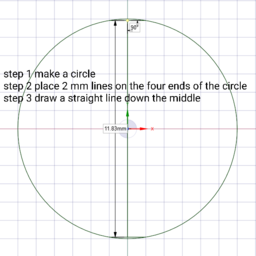
R: 23 / I: 30 /
P: 16
kiwi's Tutorials
Kiwi here to teach fellow Anons. First is how to make a ball and socket that pop together with side guides. These guides turn it into a universal joint. You can incorporate this design into many different other designs, I recommend using petroleum jelly to smooth out the motion. For reference, the ball is a 12 mm sphere. The socket has an internal 13 mm sphere and the mm difference is necessary at all scales.
More tutorials will come. All information is freely given for the sake of catgrill meidos.

R: 367 / I: 84 /
P: 16
/robowaifu/meta-6: Christmastime Out In The Sticks
/meta, offtopic, & QTDDTOT
General /robowaifu/ team survey (please reply ITT) (
>>15486)
>---
Mini-FAQ
>A few hand-picked posts on various /robowaifu/-related topics
-
Why is keeping mass (weight) low so important? (
>>4313)
-
How to get started with AI/ML for beginners (
>>18306)
-
"The Big 4" things we need to solve here (
>>15182)
-
HOW TO SOLVE IT (
>>4143)
-
Why we exist on an imageboard, and not some other forum platform (
>>15638,
>>17937)
-
This is madness! You can't possibly succeed, so why even bother? (
>>20208)
>---
-
Library thread (good for locating terms/topics)
(
>>7143)
>note: There's a simple searching tool coded right here for /robowaifu/ that provides crosslinks straight to posts on the board. It's named Waifusearch, and the link to the latest code should always be maintained within the Library thread's OP & also on the current /meta.
-
Latest version of Waifusearch v0.2a
(
>>8678)
>note: We periodically release the full archive of the board's thread's JSON files. This is useful for robowaifu researchers in general, and is explicitly relied-upon by Waifusearch.
-
Latest version of /robowaifu/ JSON archives v221213
Dec 2022
https://files.catbox.moe/6rhjl8.7z
if you use Waifusearch, just extract these JSON files into your 'all_jsons' directory for the program, then quit (q) and restart.
>note: There's an archiving tool coded right here for /robowaifu/ that provides the ability to backup locally the posts & files from our board. It's named BUMP, and is basically a custom IB scraper.
-
Latest version of BUMP v0.2g
(
>>14866)
>---
>note: There's a design document for the specification of general design and engineering choices for our basic Robowaifu Reference Model A Series (TBD). Please have a look at it, and collaborate together with us on it ITT Anon.
-
Robowaifu Design Document
(
>>3001)
>---
>useful external resources
wAIfu-collective's AI guide -
https://rentry.org/waifu-diy-ai
>---
-
previous /meta's
(
>>38)
(
>>3108)
(
>>8492)
(
>>12974)
(
>>15434)
>===
-
minor subj edit
-
mini-faq edit
-
re-org notes/faq sections
-
add/rm 'community-cheer' notice
-
begin 'external resources' listing 
R: 31 / I: 11 /
P: 16
Robowaifus' unique advantages
People often think about robots as just a replacement for a human partner, but that is a very limiting view. Let's think about the unique benefits of having a robowaifu, things that a human couldn't or wouldn't give you. What needs and desires would you robot wife fulfill that you couldn't fulfill even in a "great marriage" with a flesh and blood woman?
I'd want my robowaifu to squeeze me and to hold me tight when I sleep, sort of like a weighted blanket. I know it's a sign of autism. I don't care.

R: 10 / I: 4 /
P: 16
Homemade doll waifu thread
I just found this board a few days ago but I've been planning for about a year to make a homemade sex doll, like the kind that will imminently be made illegal here in the US. I want to detail my plan. I know this board has an anti-3DPD/anti-sex-doll bias, but hear me out.
Like many on this board, I initially had the ambition to make a sophisticated robot, but realized I should start small and reproduce something others have already created. Since my preferred, ahem, flatness of doll is soon to be illegal, it would be nice to have a homemade alternative.
Smooth-On Inc sells a brand of mold-and-set silicone, available on Amazon and elsewhere, that is easy to use and designed for human prosthesis. I intend to use Ecoflex 00-30 with Silc-Pig for pigment (and freckles). I experimented with creating a homemade onahole using Ecoflex with limited success.
For the mold, I intend to build it in segments using a 3D printer. I've be practicing modeling girls in Blender. What I have so far is acceptable for my tastes, although I'm no expert at 3D modelling or the human form. I also designed 2 mold halves for a tinkerbell sized prototype. The mold halves have holes for screws (to press them together) and a funnel at the top. I got as far as exporting to STL to observe how the slicer handles it. Once I get a new 3D printer, I'll print these mold halves and pour some Ecoflex into them. I may also put in some steel wire as a makeshift skeleton.
I had a crap 3D printer that I threw out. I'm currently trying to move to a new city and therefore won't be able to buy a new printer until I get settled. Not having a printer is the number one impediment to this project right now. I would love to hear opinions on what 3D printer model is ideal. I'd be willing to spend upwards of $1k. I've been thinking of buying used to get a better deal. I'd like a large build plate to minimize the number of parts for the full sized mold.
One thing I'm not sure of is how to make the skeleton. I will experiment with 3D printing the skeleton, but I don't really know how to make linkages. Nevertheless I have started designing them using SCAD. I also wonder how the pros make the skeleton sit in the right place within the mold, without any part of the skeleton touching the mold. Would love to hear your thoughts on this.
Usually doll heads are separate from the body (screwed on at the neck) and the body is completely one piece. This is my plan, although removable arms and legs would be a possibility. I'm hoping to make a removable vagina as well, for ease of cleaning.

R: 355 / I: 308 /
P: 16
Prototypes and failures
Post your prototypes and failures.
I'll start with a failed mechanism, may we build upon each others ideas.
R: 354 / I: 143 /
P: 17
Robowaifus in media
After reading anon's Robowaifu fiction bread, I wondered what media is out there that already predominately features a robowaifu(s) as an important character. Animu and mango are obvious choices (pic related), but surely there are live action movies as well.
https://en.wikipedia.org/wiki/Chii>tl;drpost robowaifu movies, books, etc.

R: 354 / I: 135 /
P: 17
/robowaifu/meta-5: It's Good To Be Alive
/meta, offtopic, & QTDDTOT
General /robowaifu/ team survey:
(
>>15486)
Note:
Latest version of /robowaifu/ JSON archives available is v220523
May 2022
https://files.catbox.moe/gt5q12.7z
If you use Waifusearch, just extract this into your 'all_jsons' directory for the program, then quit (q) and restart.
Mini-FAQ
>A few hand-picked posts on various topics
-
Why is keeping mass (weight) low so important? (
>>4313)
-
HOW TO SOLVE IT (
>>4143)
-
/robowaifu/ 's systems-engineering goals, brief synopsis (
>>16376)
-
Why we exist on an imageboard, and not some other forum platform (
>>17937)
>---
-
Library thread (good for locating topics/terms):
(
>>7143)
>note: there's also a searching tool coded right here for /robowaifu/ that provides crosslinks straight to posts on the board. it's named Waifusearch, and the link to the software is provided inside the Library thread's OP.
-
Latest version of Waifusearch v0.2a
(
>>8678)
-
Latest version of BUMP v0.2g
(
>>14866)
>---
There's a design document for the specification of general design and engineering choices for our basic
Robowaifu Reference Model A Series (TBD). Please have a look at it, and collaborate together with us on it ITT Anon.
-
Robowaifu Design Document
(
>>3001)
>---
-
previous /meta's:
(
>>38)
(
>>3108)
(
>>8492)
(
>>12974)
>===
-
add team survey notice
-
edit thread headliner
-
update 'mini faq' 
R: 10 / I: 1 /
P: 17
Minimalist Breadboard Waifu
Did an engineering exercise to make a """recreational companion robot"""
Worked on it for a week or two and hit the MVP. My preferred alternative git service is on the fritz so I'm posting the code here.
>What does it do?
You press the button to stimulate it, and it makes faces based on the stimulation level.
The goal was to demonstrate how little is needed to make a companion robot. A "minimum viable waifu", if you will.
I think small, easily replicable lil' deliverables like this would help interest in the robowaifu project, because the bar to entry is low. (In both skill and cost). It has meme potential.
I hope you guys find it useful in some way. If there is enough interest in the project, I may start working on it again.
>---
>related
> (>>367, Embedded Programming Group Learning Thread 001)
>===
-
add C programming thread crosslink
R: 28 / I: 8 /
P: 17
Emotions in Robowaifus.
Hello, part-time lurker here. (Please excuse me if a thread on this topic exists already) I have and idea on how we could plan to implement emotions easily into our Robowaifus.
This idea stems from Chobits where Persocoms change behavior based on battery level. So please consider this.
Emotions would be separated into two groups. Internal and external stimuli.
Internal stimuli emotions are things like lethargy, hunger, weakness, etc. Things that are at their base are derived from lower battery and damaged components.
External stimuli emotions, things like happiness, sadness, etc. Provoked from outside events, mostly relating to how the humans (and master) around her act. A mob mentality way of processing emotions.
All of this would be devoid of any requirement for AI, which would quicken development until we make/get a general AI. So until that time comes I think this artificial implementation for emotions would work fine.
Though when AIs enter the picture this emotion concept is simple enough that a compatability layer could be added so that the AI can connect and change these emotions into something more intelligent. Perhaps a more human emotional response system [irrational first thought into more thought out rational/personality centered response] or a direct change of the base emotional response by the AI as it distinguish itself from the stock personality to something new.
:]
> (>>18 - related-thread, personality)
> (>>9 - " , face)
>===
-
add related-thread crosslinks
R: 41 / I: 9 /
P: 17
Building the ultimate waifu.
For shits and giggles, let's discuss what we would do to build our ultimate robowaifu in an age wherein synthetic flesh is already a thing and we're closer and closer to AI.

R: 8 / I: 4 /
P: 17
Thot in the Shell 1
TITS Robowaifus
The basic idea is that IRL females will be plugged into remote-operation consoles; from there they will have some teleoperational control of robowaifus during engagements. The basic point being human contact for Anon.
Obviously, this situation is fraught with both possibilities and hazards.
As a board, we had a somewhat extensive discussion and debate on the topic in our first-ever /robowaifu/ council over in the /meta-3 thread (
>>9712). As the BO, I had to come to some type of decision on the matter in the end, and here it is: (
>>10194). While we didn't actually manage a consensus, my decision was to go ahead and proceed with developing the concept more fully here on /robowaifu/.
Therefore, the TITS Robowaifus thread #1 is now open for business -- with two fundamental caveats.
1. Absolutely no free-form, 'open-mic', unconstrained, verbal or physical control by TITS thots of any TITS Robowaifus themselves. The most problematic issues with the whole idea all stem directly from failing to enforce this basic rule. Also, the intricacies of pulling off implementing these restraints
correctly, and still allowing for an appealing, effective, and fun engagement for the Anon himself is actually quite a dramatic challenge & achievement. Solving all this will advance many different robowaifu-related areas all together at once.
2. Men will be free to turn
off 'safetys' if they desire to plug their IRL GFs into the remote-end of a TITS connection. They are taking their own lives in their hands with such a risk, and they will be clearly informed of that.
Note that this is a privately-conducted connection between Anon and his GFs, and isn't in any way associated with any business-oriented systems utilizing professional prostitutes (whether they are labeled as such or not). Basic safetys are not to be disabled in that context whatsoever.
Because we are cutting new trails here on robowaifu frontiers (yet again), it's unclear to me yet whether these 'rules' will be sufficient. They probably will receive (potentially extensive) revisions as we move forward. After all, this entire premise represents a significant increase in the complexity of the many issues involving robowaifus already, and puts several new items onto that table as well.
Note: please keep all TITS Robowaifus discussions contained to just the TITS threads themselves.
>---
Cheers /robowaifu/, let us proceed. This is sure to be quite a ride! :^)
>===
-
complete overhaul of the OP 
R: 16 / I: 7 /
P: 17
Important things about building living robots
Robots in our price range would have to be made of cheap, but sturdy materials.
3D printed nylon is a good material, as it is sturdy, doesn't shatter like PLA, and is tolerant of many temperatures. Aluminum pieces like those in a VEX set are good for things like the thoracic vertebrae, or the femurs.
AI is also not born perfect. It is created like a child. You must raise it to be social. To accommodate this, an infant model must be built for the robot to learn basic social skills, movement, etc. Even MLAATR itself has shown this, though I imagine a head on a small body with simple legs or wheels would suffice. You could simply remove the head and place it onto the older body as a birthday gift for it.
I also have to point out something that might disappoint, do not read this spoiler if your dreams of a robot wife are delicate. You cannot fuck your robowaifu unless it's an already-existing girl's consciousness stuck into the robot. Making your own waifu's mind is like father and child incest.

R: 45 / I: 43 /
P: 17
Aoki Lapis model; Robot fairy
Height; 15cm
Type; Vocaloid
I'm making it in as natural looking way as I can, this means a bone structure and a similar layout of the electronics and components as with a living humanoid
This is a prototype version that I'm working on, I might change things later and make modifications or adjustments to the design or components

R: 9 / I: 1 /
P: 17
TalkToWaifu
Anyone know what happened to the TalkToWaifu GPT-2 AI? I saw some screenshots of what I assume was the trained AI and it was great for a single dev. Recently went back to their Gitlab page and the user account had been deleted and remade, and the Github repo (
https://github.com/kokubunji/TalkToWaifu) hasn't been touched in 9+ months.
Anything out there more recent that this, an AI that has no human cultural restrictions? Corps love to add in shit to AI so they won't say anything racist, sexist, xenophobic, anti-Semitic etc etc you get the point.
R: 23 / I: 15 /
P: 17
Ashiel - A Robowaifu Design Project
< Introduction to This Thread
This thread is going to be dedicated to my ongoing robowaifu project. This isn't exactly new, I have mentioned it here before in passing. However, this is the first thread I have opened specific to my robowaifu project and not an artificially intelligent chatbot.
This thread will be updated when I have something to say about robowaifu design, or have an update on the project. Most of the content will be of the kind of me proposing an idea or suggestion for developers to make the construction of a robowaifu easier. My design philosophy is one of simplicity and the solving of problems instead of jumping to the most accurate simulacrum of the female human form. Small steps make incremental progress, which is something the community need because little progress is made at all. What progress we do make takes years of work, typically from a single person. Honestly, I'm getting tired of that being the norm in the robowaifu community. I'm frankly just done with that stagnation. Join me on my journey, or get left behind.
< About Ashiel
ASHIEL is an acronym standing for /A/rtificial /S/hell-/H/oused /I/ntelligence and /E/mulated /L/ogic. Artificial, created by man. Shell-Housed, completely enclosed. Intelligence and Emulated Logic, are both a combination of machine learning-based natural language processing and tree-based lookup techniques. ASHIEL is simply Ashiel in any future context, as that will be her name.
Ashiel is an artificially intelligent gynoid intended to specialize in precise movement, and engage in basic conversation. Its conversational awareness would be at least equal to that of Replika, but with no chat filtering and a much larger memory sample size. If you want to know what this feels like, play AIDungeon 2. With tree-based lookup, it should be able to perform any of the basic tasks Siri or Alexa can perform. Looking up definitions to words over the internet, managing a calendar, setting an alarm, playing music on demand... etc.
The limitations of the robot are extensive. Example limitations include but are not limited to: the speaker will be located in the head mouth area but will obviously come from an ill-resonating speaker cavity; the mouth will likely not move at all, if so not in any meaningful way;
The goals of the project include: basic life utility; accurate contextual movement; the ability to self-clean; ample battery life; charging from a home power supply with no additional modifications; large memory-based storage with the ability to process and train in downtime; and yes, one should be able to fuck it.
This is meant to be the first iteration in a series of progressively more involved recreational android projects. It is very unlikely the first iteration will ever be completed of course. Like many before me, I will almost certainly fail. However, I will do what I can to provide as much information as I can so my successors can take up the challenge more knowledgeably.
< About Me
I am SoaringMoon, a tabletop game designer and artificial intelligence safety researcher. I consider robowaifu a hobby, and a subject in the interest of curiosity. I am an advocate for robosexuality and have always been attracted to androids and gynoid robots. I have no idea why. It is nothing to do with fetishism, sexual gratification, or anything of that sort. I just find artificial feminine forms attractive, and see potential in the clinical precision of raw information-derived conversations from chatbots. I can't wait to see what the future holds there.
I have an intermediate amount of 3D modeling experience, but no experience in 3D animation or rigging. I do however have experience in building evolution simulations containing creatures with basic neural networks.
Lastly, and most controversially, I am vocal about not being afraid of what other people think of me or my personal vocational interests. I realize I am dangerously easy to find, and there are people willing to try to "cancel" me just because I want to build a fuckable female android. I don't care if you are a chauvinist or feminist, left or right, straight or gay, vaxxed or unvaxxed... all I care about is that you support people's creative efforts or attempts to share knowledge with others.
It benefits every single person regardless of your personal opinion. It doesn't matter what you think about companionship robots, robot secretaries, literal feminine robot dishwashers and sandwich makers, or sexbots. For every alleged chauvinist who wants a female robot sex slave, there are 10 elderly people who can have a full-time conversational companion capable of doing the chores they are physically unable to perform. Allowing them to live a comfortable end of life without the need of a nursing home, or hospice care. If you are against that you can fuck right off.
< Image: ELENOR (Phantasy Star Online EP 1)
R: 89 / I: 38 /
P: 18
Robot Wife Programming
ITT, contribute ideas, code, etc. related to the area of programming robot wives. Inter-process and networking is also on-topic, as well as AI discussion in the specific context of actually writing software for it. General AI discussions should go in the thread already dedicated to it.
To start off, in the Robot Love thread a couple of anons were discussing distributed, concurrent processing happening inside various hardware sub-components and coordinating the communications between them all. I think that Actor-based and Agent-based programming is pretty well suited to this problem domain, but I'd like to hear differing opinions.
So what do you think anons? What is the best programming approach to making all the subsystems needed in a good robowaifu work smoothly together?

R: 360 / I: 161 /
P: 18
General Robotics/A.I. news and commentary
Anything in general related to the Robotics or A.I. industries, or any social or economic issues surrounding it (especially of RoboWaifus).
www.therobotreport.com/news/lets-hope-trump-does-what-he-says-regarding-robots-and-robotics
https://archive.is/u5Msf
blogmaverick.com/2016/12/18/dear-mr-president-my-suggestion-for-infrastructure-spending/
https://archive.is/l82dZ
>===
-
add A.I. to thread topic
R: 6 / I: 5 /
P: 18
https://www.youtube.com/watch?v=SWI5KJvqIfg
I have been working on creation of waifus using GANs etc... I've come across this project and I am totally amazed. Anyone has any idea how we can achive this much of a quality animation based GAN created characters? I think accomplishing this kind of work would have a huge impact on our progression. Calling all the people who posted at chatbot thread.

R: 2 / I: 3 /
P: 18
Neurosymbolic AI
I stumbled upon a couple videos critiquing "Deep Learning" as inefficient, fragile, opaque, and narrow [1]. It claims Deep Learning requires too much data, yet it performs poorly trying to extrapolate from training set, and how it arrives to its conclusions are opaque, so it's not immediately obvious why it breaks in certain cases, and all that learned information cannot be transfered between domains easily. They then put forth "Neurosymbolic AI" as the solution to DL's ails and next step of AI, along with NS-VQA as an impressive example at the end [2]. What does /robowaifu/ think about Neurosymbolic AI (NeSy)?
NeSy is any approach that combines neural networks with symbolic AI techniques to take advantage of both their strengths. One example is the Neuro-Symbolic Dynamic Reasoning (NS-DR) applied on the CLEVRER dataset [3], which cascades information from neural networks into a symbolic executor. Another example is for symbolic mathematics [4], which "significantly outperforms Wolfram Mathematica" in speed and accuracy.
The promise or goal is that NeSy will bring about several benefits:
1. Out-of-distribution generalization
2. Interpretability
3. Reduced size of training data
4. Transferability
5. Reasoning
I brought it up because points 3 and 5, and to a lesser degree 4, are very relevant for the purpose of making a robot waifu's AI. Do you believe these promises are real? Or do you think it's an over-hyped meme some academics made to distract us from Deep Learning? I'm split between believing these promises are real and this being academics trying to make "Neurosymbolic AI" a new buzzword. [5] tries to put forth a taxonomy of NeSy AIs. It labels [4] as an example of NeSy since it parses math expressions into symbolic trees, but [4] refers to itself as Deep Learning, not neurosymbolic or even symbolic. Ditto with AlphaGo and self-driving car AI. And the NS-DR example was beaten by DeepMind's end-to-end neural network Aloe [6], and overwhelmingly so when answering CLEVRER's counterfactuals. A study reviewed how well NeSy implementations met their goals based on their paper, but their answer was inconclusive [7].
It's also annoying looking for articles on this topic because there's like five ways to write the term (Neurosymbolic, Neuro Symbolic, Neuro-Symbolic, Neural Symbolic, Neural-Symbolic).
>References
[1] MIT 6.S191 (2020): Neurosymbolic AI. <
https://www.youtube.com/watch?v=4PuuziOgSU4>
[2] Neural-Symbolic VQA: Disentangling Reasoning from Vision and Language Understanding. <
http://nsvqa.csail.mit.edu/>
[3] CLEVRER: CoLlision Events for Video REpresentation and Reasoning. <
http://clevrer.csail.mit.edu/>
[4] Deep Learning for Mathematics <
https://arxiv.org/abs/1912.01412> (article: <
https://www.quantamagazine.org/symbolic-mathematics-finally-yields-to-neural-networks-20200520/>)
[5] The Third AI Summer. Part III. <
https://youtu.be/_cQITY0SPiw?t=1745>
[6] Attention over learned object embeddings enables complex visual reasoning. <
https://arxiv.org/abs/2012.08508> (article: <
https://venturebeat.com/2020/12/21/deepmind-researchers-claim-neural-networks-can-outperform-neurosymbolic-models-on-visual-tasks/>)
[7] Is Neuro-Symbolic AI Meeting its Promise in Natural Language Processing? A Structured Review. <
https://arxiv.org/abs/2202.12205>
>Further Reading
Neurosymbolic AI: The 3rd Wave. <
https://arxiv.org/abs/2012.05876>
Neuro-Symbolic AI Archives. <
https://mitibmwatsonailab.mit.edu/category/neuro-symbolic-ai/>
R: 41 / I: 28 /
P: 18
Reploid thread
A few people thought it'd be a good idea to start a thread for Reploid builds, so here we are!
To kick things off, here's a little progress on painting my own RiCO. It's just spray paint so it doesn't look stellar and I screwed up a couple parts. All the blue trim paint needs done as well. I don't care if it's perfect, I just want to get her done.
Not to mention anything adjacent to "art" or "craftsmanship" is beyond me, mostly due to lack of patience: I don't want to spend 1000s of hours grinding away with a paintbrush when I could be designing up cool (to me...) robotic mechanisms for instance. I bet you bottom dollar none of my projects will be winning awards in the fit-and-finish department.
Can't wait to see what happens with Pandora and whatever other Reploid projects people might be working on.
R: 2 / I: 5 /
P: 18
Language Models as Zero-Shot Planners: Extracting Actionable Knowledge for Embodied Agents
https://wenlong.page/language-planner/
https://github.com/huangwl18/language-planner
Can world knowledge learned by large language models (LLMs) be used to act in interactive environments? In this paper, we investigate the possibility of grounding high-level tasks, expressed in natural language (e.g. "make breakfast"), to a chosen set of actionable steps (e.g. "open fridge"). While prior work focused on learning from explicit step-by-step examples of how to act, we surprisingly find that if pre-trained LMs are large enough and prompted appropriately, they can effectively decompose high-level tasks into low-level plans without any further training. However, the plans produced naively by LLMs often cannot map precisely to admissible actions. We propose a procedure that conditions on existing demonstrations and semantically translates the plans to admissible actions. Our evaluation in the recent VirtualHome environment shows that the resulting method substantially improves executability over the LLM baseline. The conducted human evaluation reveals a trade-off between executability and correctness but shows a promising sign towards extracting actionable knowledge from language models.
I think it's worth a whole thread.
If not, move it to the appropriate section.

R: 113 / I: 78 /
P: 18
Who wouldn't hug a kiwi.
Important good news for Kiwi! (>>14757)
===
Howdy, I'm planning on manufacturing and selling companion kiwi robot girls. Why kiwi girls? Robot arms are hard. What would you prefer to hug, a 1 m or 1.5 m robot? Blue and white or red and black? She'll be ultra light around 10 to 15 kg Max with self balancing functionality. Cost is dependent on size, 1000 for 1 m or 1500 for 1.5 m. I'm but one waifugineer, so I'm going to setup around one model to self produce. If things go well, costs can go down and more models can be made. Hopefully with arms someday.
>===
-
add news crosslink 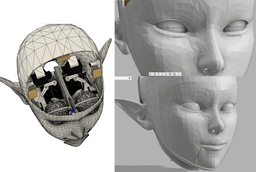
R: 351 / I: 180 /
P: 18
Elfdroid Sophie Dev Thread 2
The end of an era...(>>14744)
===
The saga of the Elfdroid-pattern Robowaifu continues!
Previous (1st) dev thread starts here
>>4787
At the moment I am working to upgrade Sophie's eye mechanism with proper animatronics. I have confirmed that I'm able to build and program the original mechanism so that the eyes and eyelids move, but that was the easy part. Now I have to make this already 'compact' Nilheim Mechatronics design even more compact so that it can fit snugly inside of Sophie's head.
One big problem I can see coming is building in clearance between her eyeballs, eyelids and eye sockets so that everything can move fully and smoothly. I already had to use Vaseline on the eyeballs of the first attempt because the tolerances were so small. If the eyelids are recessed too deep into her face, then she looks like a lizard-creature with a nictitating membrane. But if the eyelids are pushed too far forward then she just looks bug-eyed and ridiculous.
There is a middle ground which still looks robotic and fairly inhuman, but not too bad (besides, a certain degree of inhuman is what I'm aiming for, hence I made her an elf).
Links to file repositories below.
http://www.mediafire.com/folder/nz5yjfckzzivz/Robowaifu_Resources
https://drive.google.com/drive/folders/18MDF0BwI9tfg0EE4ELzV_8ogsR3MGyw1?usp=sharing
https://mega.nz/folder/lj5iUYYY#Zz5z6eBy7zKDmIdpZP2zNA
>===
-
add file repo links
-
add era's end crosslink 
R: 359 / I: 122 /
P: 18
/robowaifu/meta-4: Rugged Mountains on the Shore
/meta & QTDDTOT
Note:
Latest version of /robowaifu/ JSON archives available is v220117
Jan 2022
https://files.catbox.moe/l5vl37.7z
If you use Waifusearch, just extract this into your 'all_jsons' directory for the program, then quit (q) and restart.
Note:
Final version of BUMP available is v0.2g
(
>>14866)
>---
Mini-FAQ
>A few hand-picked posts on various topics
-
Why is keeping mass (weight) low so important? (
>>4313)
-
HOW TO SOLVE IT (
>>4143)
>---
-
Library thread (good for locating topics/terms):
(
>>7143)
>note: there's also a searching tool coded right here for /robowaifu/ that provides crosslinks straight to posts on the board. it's named Waifusearch, and the link to the software is provided inside the Library thread's OP.
-
Latest version of Waifusearch v0.2a
(
>>8678)
-
Latest version of BUMP v0.2g
(
>>14866)
>---
There's a design document for the specification of general design and engineering choices for our basic
Robowaifu Reference Model A Series (TBD). Please have a look at it, and collaborate together with us on it ITT Anon.
-
Robowaifu Design Document
(
>>3001)
>---
-
previous /meta's:
(
>>38)
(
>>3108)
(
>>8492)
>===
-
add RDD section
-
add/rm group brainstorm notice
-
expand mini-faq
-
add/rm 'chobitsu returns' msg
-
add/edit/rm 'chikuning' notice
-
update all_jsons notice
-
add final BUMP notice 
R: 108 / I: 58 /
P: 18
Open Simple Robot Maid (OSRM)
Basic design for an open source low cost robowaifu maid. Currently attempting to make a maid that looks like Ilulu from Miss Kobayashi's Dragon Maid. Right now she's an RC car with two servo steering. Will share designs when they're a tad better. Ultimate goal is cute dragon maid waifu that rolls around and gently listens to you while holding things for you.
R: 74 / I: 17 /
P: 19
Why consider alternative CPU architectures for secure systems?
Hello Anons, wanted to share some info and perhaps make you think about what you should compute with.
x86/amd64
-Proprietary ISA (Instruction Set Architecture)
This means to get enough low-level detail requires signing non disclosure agreements (NDA).
Even then, they might not disclose all the available commands (see Breaking x86 video below).
If you cannot trust what the processor is doing, then no open-source software will make it any more trustworthy.
-Complexity
Common instruction sets come with hundreds (over a 1000 for x86) instructions.
Breaking x86 instruction set
https://www.hooktube.com/watch?v=KrksBdWcZgQ
Hardware backdoor x86 (not for all processor models)
https://www.hooktube.com/watch?v=_eSAF_qT_FY
The more complex the system, the more bugs (in hardware and software).
Intel had plenty of bugs that were discovered post release, for example the Pentium floating point division:
https://en.wikipedia.org/wiki/Pentium_FDIV_bug).
Interestingly, the x86 assembly instructions are actually decoded to a sequence of RISC instructions to be used by the internal cores of the CPU.
https://stackoverflow.com/questions/5806589/why-does-intel-hide-internal-risc-core-in-their-processors
-Security/Backdoors
Intel has its Management Engine, which provides full access to CPU, RAM(?), control via network.
Advertised for sysadmins, but present on consumer hardware.
https://www.hooktube.com/watch?v=3CQUNd3oKBM
Intel ME Cleaner - Tool for disabling and pruning Intel ME from BIOS/UEFI firmware.
https://github.com/corna/me_cleaner
AMD Platform Security Processor (PSP)
Similar to Intel ME, based on an ARM core.
Video below shows how bios can be analysed.
Looks to be somewhat tamer compared to Intel ME, however this may have changed.
Dissecting AMD PSP:
https://www.hooktube.com/watch?v=IW2YsxSj6zE
Speaking to an experienced programmer, he told me the main reason why x86 is the main desktop/PC architecture, is that it allows compiling C almost directly to assembly. This is not the case as for ARM ISAs or RISC V.
I guess from a certain perspective, if you had an architecture with enough instructions to better support C (such as array operations) then it might have a chance at competing with x86.
ARM
Proprietary ISA, several versions available, current is v8.
There are licensing fees for use in custom ASICs, don't know how much the documentation covers the internals.
The are many Single Board Computers (SBC) using an ARM-based.
They are probably a better option compared to an x86 system security wise, however the underlying arch is still unknown.
RISC V
Reduced Instruction Set Computing V
I was once an excited
consoomer for RISC V, until I heard about a libre project designing a system-on-chip (SoC) that struggled to get the necessary amendments to the standard (for graphics) put through. Here's a snippet from the project lead:
>if you were not associated directly with UC Berkeley, you were basically not welcome. Caveat: if you signed the NDA-like agreement which conflicts directly with, for example, the Debian Charter and the whole purpose of libre licenses, then you got a "voice" and you got access to the closed and secretive RISC-V resources and mailing lists.
https://www.crowdsupply.com/libre-risc-v/m-class/updates/nlnet-grants-approved-power-isa-under-consideration
This was my "red pill" if you will, that like the development Linux kernel, it's predominantly focused on working towards the interests of corporations as opposed to smaller developer groups.
The ISA itself is available to study (
https://riscv.org/specifications/ ) and the main issue technically speaking is that the base instructions aren't long enough to deal with, say a 64 bit address/number directly, thus requiring extensions. The ISA has had quite a few extensions since its inception.
Alternatives
-POWER ISA originally designed by IBM. Later open-sourced.
https://openpowerfoundation.org/?resource_lib=power-isa-version-3-0
One implementation is by Raptor, using Power9 ISA. Comparable to x86 desktops, very expensive.
https://www.raptorcs.com/
-Older architectures which have been reverse engineered, or materials eventually released.
Such ISAs can be implemented inside a Field Programmable Gate Array (FPGA) for systems designed to give the user more control.
Here's a project based on the commodore
65 in an FPGA, project called MEGA65
https://github.com/MEGA65
https://www.hooktube.com/watch?v=KuNB4ocZDXA
The points by the chap are pretty good, and one of the main takeaways is:
Separate your computing environments.
Your most important, trusted code runs on a small, fully verified CPU.
While any application that requires high performance or proprietary CPU/system, runs independently without access to the trusted system
For example if you were to design a secure phone, the main system could run on a trusted FPGA core (
if you trust the FPGA of course), and when service is required, the trusted core controls whether the cellular modem is enabled.
Unfortunately, greater integration leads to high chance of security breaches and botnets, so more modular design is necessary for security.
-Libre-SoC, a system-on-chip currently in development.
Supposedly will be the first open SoC with open source graphics.
Graphics seem to be the main issue in preventing fully libre computing hardware.
What I mean is dedicated graphics, not software rendering.
https://libre-soc.org/
Ultra RISC / OISC?
One Instruction Set Computing
It may seem crazy, but there are individual CPU instructions that are Turing-complete, and hence an architecture built around this instruction can execute any finite problem (with enough RAM and time).
One example is the MOV instruction, which can move data between memory and CPU registers.
A C compiler for x86 has been written to compile your code down to just MOV instructions.
https://github.com/xoreaxeaxeax/movfuscator
The MOV-only on x86 is more of a toy than practical, however there's potential to making a simple processing core in hardware, and by having many of these cores (8+) in a multi-processor system one could achieve better performance.
One of the architectures I'm working on is the Subtract and Jump If Less Than Or Equal To Zero (SUBLEQ), as it is also Turing-complete and someone has already written an OS for it here:
http://gerigeri.uw.hu/DawnOS/index.html
The plan is to make small scale version of the CPU before going for full Dawn OS compliance (256MiB is A LOT of memory for an FPGA dev board XD)
That's about as much as I'll say for now, as I would like to spend more time developing. Don't expect it to replace your PC, however as an embedded system it'll have a shot.
What do I use?
Both my desktop and laptop have Intel processors, one Sandybridge, the other Nehalem. Have not disabled the ME, however planning to give it a test when I have more time.
I use Arch and Debian (better compatibility with tools like yosys), but I intend to move Systemd-less system, potentially Gentoo, OpenBSD or FreeBSD.
I tried Artix, however I couldn't get some things working, and their wiki isn't nearly as detailed.
So if I want to learn about another init system, I may as well start from an OS that comes with it out of the box.
What are your options?
-Use either intel or AMD, but
'CHECK if there's support for disabling the ME or PSP. ME cleaner even works on fairly recent generations of hardware:
https://github.com/corna/me_cleaner/wiki/me_cleaner-status
-Use older CPUs. CPU before ME/PSP (or earlier versions where it can be disabled) is probably the easiest.
-Use a lightweight OS. Most POSIX compliant OSs can be configured to be lightweight and hence make using older hardware realistic. The most demanding uses are compilation of programs and video playback, so those will be harder to do.
-Limit network connectivity on machines that you're concerned about. If it can't call back home then it can't leak your data eh? XD (Hehe, there are other ways for hackers to do it... Air Hopper:
https://www.hooktube.com/watch?v=2OzTWiGl1rM)
-Aim to use libre hardware, as it gives you more control over hardware. Example:
https://github.com/OLIMEX
Thanks for reading Anons.
(Just to let you know I'm definitely
NOT an expert on CPU arch's, I just want a system that's not a botnet XD)
R: 23 / I: 5 /
P: 19
Walking
What is the best way to make a life size robowaifu walk? A hydraulic pump powering hydraulic cylinders in the legs with servo actuated valves?
R: 13 / I: 3 /
P: 19
Self-replicating waifubots.
Why not build a waifu with a rudimentary AI and give her the objective to help you build a better waifu with better AI and repeat the process until you get one that is perfect?
R: 79 / I: 41 /
P: 19
Can Robowaifus Experience Love?
Will it be possible in the future for AI to become sufficiently advanced to feel real emotions? We could probably simulate a reasonable approximation even now to be a gratifying enough substitute for her master in their relationship together, but hypothetically speaking, could it ever turn into something real as an experience for the waifubot herself?
>tl;dr
>Robowaifu: "I love you Oniichan!"
>Anon: "I love you too Mikuchan."
true or false?
R: 24 / I: 8 /
P: 19
I write books about worlds of waifus.
Depending on interpretation, these waifus are fully functional and fully interactive AI. The appeal of women both existing and being capable of love, while the failures of females are explicitly depicted constitutes a significant portion of the character motivation, promoting an exodus of men from the dying, legacy Clown World and the hilarity and insanity that follows after that while based and redpilled men live their new lives in relative happiness.
So am I in the right place?

R: 351 / I: 83 /
P: 19
/robowaifu/meta-3: Spring Blossom Tree
/meta & QTDDTOT
Note:
Latest version of /robowaifu/ JSON archives available is 210905
Sep 2021
https://files.catbox.moe/h2xuqf.7z
If you use Waifusearch, just extract this into your 'all_jsons' directory for the program, then quit (q) and restart.
>---
Mini-FAQ
>A few hand-picked posts on various topics
-
Why is keeping mass (weight) low so important? (
>>4313)
>---
-
Library thread (good for locating topics/terms):
(
>>7143)
>note: there's also a searching tool coded right here for /robowaifu/ that provides crosslinks straight to posts on the board. it's named Waifusearch, and the link to the software is provided inside the Library thread's OP.
-
Latest version of Waifusearch v0.2a
(
>>8678)
-
Latest version of BUMP v0.2e
(
>>8769)
>---
-
previous /meta's:
(
>>38)
(
>>3108)
>===
-
expand /meta OP content
-
add BUMP xlink
-
rm file issues msg
-
add 1wk extension msg
-
add 'final comments' notice
-
rm council notices
-
add council decision notice
-
add TITS thread notification
-
add JSON archives link
-
add thread continuation notice
-
rm OP notice
-
begin mini-FAQ
-
add Waifusearch link
-
rm TITS notification
-
minor prose & format edits 
R: 352 / I: 107 /
P: 19
Actuators for waifu movement!
Hello fellow Anons! Kiwi here to provide basic educational facts about various actuators we can use for gifting artificial avatars of our hearts desire motion!
1. Let's start with a personal favorite, the impractical, inefficient yet oh so fascinating: Heated Twisted Nylon!
What are they? They're nylon threads which have been spun around then annealed to seal in their coils. A heating method causes these threads to then contract or expand.
Good: Why is this a personal favorite? Simply put, it's natures muscle substitute for muscles. To elaborate, this marvelous invention contracts like human muscles, has a similar practical strength/weight/volume as human muscle. Icing on this proverbial cake comes in its incredibly low cost of manufacture. Materials needed are nylon threads and a heating element. A fixture for production can be produced simply, operated with incredible ease, all while having a low cost. It very well could have revolutionized all of robotics if it weren't for its flaws.
Bad: This is honestly a terrible actuator. Its greatest flaw comes from its speed. they aren't as fast as human muscles unless they're underwater. Water reduces efficiency to unacceptable levels if they're powered by batteries. Water is also rather heavy. If used, you'd have a waifu that moved slowly , would seize up in hot weather, and her battery would die rather quickly. Final nail in the coffin: it's very difficult to get positional control.
2: Pneumatics, moving her booty with air!
What is it? Pressurized air is guided to an actuator where its energy turns into motion. Popular air actuators include rotary turbines, cylinders, and air muscles.
Good: Actuators are light for their power. Positional control isn't difficult to attain. They can be faster then human muscles. Heating elements can be used to augment performance to higher levels.
Bad: These things require electrical actuators to function properly. Thus, they're inherently more complex then electrical counterparts. They need a source of compressed air, either from a tank or a compressor and a tank. Compressors are large, heavy, noisy, all around unsuitable to be incorporated into a waifu. Air tanks would also run out rapidly unless she's barely moving. Overall, they're suited better for industrial use.
3. Hydraulics, they're like pneumatics except stronger, needs a return system, needs an onboard pump, gets hotter, generally costs more, and is heavier.
(2 and 3 are great for stationary machinery which requires high power as they're very cost effective as high power actuators)
4. AC motors
What are they? They're rotary devices which use AC current to create magnetic flux used to provide torque.
Good: Generally highly efficient with good thermal characteristics. Can have controllable speed and torque.
Bad: They run off of AC electricity, batteries don't provide that. It's not difficult to change DC to AC but, it's a layer of extra cost and complexity. Overall they're great but the next actuator is better suited for our purpose.
5: DC motors are the ideal actuator for smaller waifus.
What are they? They're actuators which convert DC electricity into rotary mechanical energy.
Good: They're inexpensive, easily attainable, and simple to control. They're very easy to control. Uses DC which batteries provide.
Bad: Need to be geared down to provide good torque. They're middle of the road efficiency wise.
(For smaller waifus, their lower efficiency compared to the next actuator isn't a major concern. Smaller batteries recharge rapidly, so having her need to charge in her bed isn't a big deal.)
6. Superior Brushless Motors are ideal actuators
What are they? DC motors which need specialty hardware to drive them.
Good: High efficiency, it's the most efficient option available.
Bad: Controllers add expense and complexity.
(1 of 2)
R: 282 / I: 167 /
P: 19
Ye Olde Atticke & Storager's Depote
Read-only dump for merging old threads & other arcane type stuff.
> tl;dr
< look here when nowhere else works anon. :^)

R: 29 / I: 5 /
P: 19
Any chatbot creation step by step guide?
So recently on /tech/ I expressed my interest to start creating my own waifu/partner chatbot(with voice and animated avatar) but wondered whether that is even possible now that I'm stuck with webdev.
So one of the anons there pointed to me this board and where I can get started on nueral networks and achieving my dream.
And when I came here and looked up the library/guide thread I sort of got very confused because it feels more like a general catalogue than an actual guide. Sometimes things are too advanced for me(like the chatbot thread which two replies in and people are already discussing topics too advanced for me like seq2seq and something else) or other times too basic for me(like basic ANN training which I had already done before and worse the basic programming threads).
I know this might feel like asking to be spoonfed but best with me, I've been stuck in a webdev job for an year, so I might not be the smartest fag out there to figure it all myself.
>===
-edit subject

R: 6 / I: 1 /
P: 19
Opensimulator
Introduction:
As we know, creating an acceptable functional robowaifu requires knowledge and techniques from different areas. One of them is simulation, there are many modern easy to use Game development frameworks or tools like Godot, Unity and Unreal engine. But even if they come with easy to use out of the box IDEs you would need to create environments, collect or make assets and if you are willing to spread your work you will have to supply the other members with the source code and assets. Here is where opensimulator comes to the rescue.
What is opensimulator?:
Opensimulator is a .NET based technology (which runs perfectly on mono) that allows you to create distributed 3D world simulator environments and users can visit them and interact with them using different client/viewers. You can split your simulators and connect them into a public or private grid, and grids can allow users from other grids visit them its called hypegrid (you can see hypergrid as a 3D internet based on opensimulator)
Here is the list of popular public opensimulator based grids:
http://opensimulator.org/wiki/Grid_List
If you are wondering how many active users there are you can make an idea using this hypegrid index:
https://opensimworld.com/dir
This technology is an opensource clone of a private platform called secondlife which unfortunately is not well known or underestimated is selled as a simple social 3D platform when in fact is a huge collaborative 3D development environment (in which even robowaifus exists).
What can I do inside opensimulator?
You can do basic 3D building inside the platform, create terrains , avatars , NPC , it comes with scripting languages, as opensimulator is an opensource version of secondlife the most used scripting languaje is LSL
http://wiki.secondlife.com/wiki/LSL_Portal but even if the language is terrible verbose, it has a lot of features that would let you play with physics, and things that formal game engines would take a lot of time with the extra that you could share your work easily. Also opensimulator comes with NPC functions would allow you to simulate agents.
How can I start with opensimulator?
You have three flavors:
> The super normie way, just make a secondlife account and start exploring (everything you learn there works exactly as opensimulator , there was a time where linden labs pushed opensimulator and they made the experiment to connect it to the hypergrid)
> The not so much normie way, create an account in a public grid like https://www.osgrid.org/ and connect using an opensimulator viewer like firestorm https://www.firestormviewer.org/os-operating-system/
>The nerd way, download opensimulator, deploy a grid in your own server and enable hypergrid so other grids users can visit your simulators (they have access control list in case you wanna make private regions)
>===
-
add thread subject
R: 19 / I: 2 /
P: 20
THE LANGUAGE PROBLEM
'Sup anons? I am here to remind you guys something important, TO DO YOUR RESEARCH IN MULTIPLE LANGUAGES. Our mutual language is English however that is not enough. We need people who can speak those 3 important languages: Japanese, Chinese, Russian. I've been learning japanese for 4 months and with the help of dictionary I am able to understand basic stuff. Here is the point, there is a whole another world out there.
1) Chinese: Chinese people work under such hard circumstances and put really much effort into their jobs. Nearly none of the projects are translated into English since Google is banned at China. However there are a lot of great stuff there, I mean like even Microsoft runs their virtual woman project there. Since it is too hard for me to learn I generally use DeepL (best translator out there) and Baidu (Chinese search engine) and read latest researches and projects there. I wish I knew chinese well, in that case I would be able to find not-so-popular webpages and grab more information on topics.
2) Japanese: Even though good Japanese projects gets translated into English most of the research there gets translated only when the projects is ready to publish and sometimes they are too hard to find. I try to read as much AI papers in Japanese as I can. Scientists there do great stuff. I've seen a lot of robowomen projects there. You can also find some 3d printing projects for anime girls. Really worth looking.
3) Russian: Russian is the least important one in my opinion. But a professor of mine graduated from a university there and he has a lot of academic books that aren't translated to English. You would be amazed at how much work they have on stuff such as algorithm theory, artificial intelligence, computer science. Most of the stuff there are focused on "science" part of CS. So they are theory-weighted.
So right now we need people who can speek Japanese and Chinese (Korean would be good as well, but there isn't that much of research there tbh) Using DeepL is enough to understand most of the pages but only a person with fluent Chinese/Japanese would be able to find goldmines deep there. I am pretty sure that there are hundreds of Chinese people working on robowaifu related projects that we are not aware of. Same applies for Japanese people, but since Chinese people are in a much worse situation it becomes really hard to find those people. Anyone has some recommendations? I wish I had time and skills to learn all those languages but I can only afford to learn one and I am going with Japanese since I have a dream of moving there in the future. We need to brainstorm on this issue.
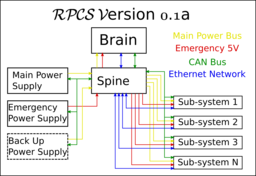
R: 42 / I: 4 /
P: 20
Robowaifu Power and Control Systems
Hi Anons, making a thread as suggested in
>>10947
I've been thinking about this for a long while, and wanted to throw in a draft and see if anyone has comments/criticisms/additions.
I present to you the draft of the Robowaifu Power and Control System (RPCS). This draft is by no means complete or definite, but it is a starting point. Let's call it version 0.1a. The version follows major.minor and a letter for bug-fixes. Minor is for feature addition/reduction, major for when we eventually get there XD. From a legal stand point, this is under CC0 or public domain (unless Chobitsu has specific licensing for the content on /robowaifu/). I intend for the draft to develop further and stay open for use by anyone.
Summary
A full-size robowaifu system needs several things:
- Power distribution. Main system bus coming from a Li-ON battery (or other technology). One backup 5V emergency power supply used by slow communications to check appendage integrity, sensors etc.
- Main processor. In this post I won't be delving into it in great detail, and mostly treating it as a black box.
- Low/medium throughput communication for simple sensor, debug, or status information. Must be robust and must work before any high-level software is working (including the network stack).
- High throughput communication for large data-logging, visual processing etc.
- "Spine" or communication interconnect. Multiplexes many connections from many sub-systems to the main processor. Includes power distribution connection (allowing individual control to sub-systems).
- Sub-systems to actually do the fun stuff! (Arms, legs, nekomimi ears, etc.)
Terminology
Brain refers to the main processor (and all of its sub-systems treated as a single unit).
Body refers to all the sub-systems and interconnect as a whole.
Spine refers to sub-system in charge of collating data to the brain.
Sub-system refers to the individual blocks making up the body (technically includes the brain and spine).
Power Distribution
For low power electronics you'll need 3.3V and lower, 5V for bulkier sensors, 12V for small motors, 24V or 48V for heavy duty movement (or heating etc.). As DC-DC switch-mode power supplies have been improving in efficiency, it may be worthwhile to only have one bus voltage (such as 12V or 24V), while generating the others locally. This would reduce the number of cables and overall complexity. You may have noticed this happening to PC ATX supplies, as older ones used to have +/-3.3V and +/-5V (with decent current ratings), whereas now most of the current rating is on the 12V rail and negative supplies are generated locally.
Switch-mode power supplies are noisy (have ripple current and voltage) and also require careful design to ensure stability (look into control theory, it is fun >:) ), so precision sensors, ADCs/DACs etc. need to have additional filtering and potentially local voltage/current regulators and references. However I don't consider this a major issue as noise will be picked up regardless along the wires coming from the power system to anywhere else. Shielding will also be required to reduce electromagnetic interference (as such long wires will essentially become radio antennas).
Depending on battery technology, we may also get close to the desired bus voltage anyway and may have something akin to VBUS (which has a range of 4.5-5.5V) where the overall bus voltage will rise and fall depending on current battery level. For example:
3-series Li-ON cell, output voltage range of 11.1-12.6V
4-series Li-ON cell, output voltage range of 14.8-16.8V
Perhaps the sub-systems could also individually monitor the bus voltage and adjust their operating profile based on available capacity?
For example, reduce amount of unnecessary movement (sway, general social cues etc.) when battery reaches low level.
An emergency power rail would aid in situations where the main supply is down or intermittent. I propose using 5V, as it is enough to both microelectronics, as well as small sensors and motors. It must be isolated from the main bus and hence generated separately by an additional battery (but could be charged from the same charging socket).
The power supply block can be tested (voltage/current measurements) and restarted (main supply restarted by emergency supply, emergency supply restarted by main supply). Granular power control to individual sub-systems is controlled from the spine.
Perhaps it is worthwhile to have a redundant secondary bus? Exactly the same as primary (automatically switched to in the spine), but isolated and located elsewhere. Diagram shows this as an optional (dashed rectangle).
Can be communicated with using the low throughput connection. Is high throughput connection necessary?
[PART 1]
R: 13 / I: 1 /
P: 20
New Paradigm of CPU and PCB Architecture
Considering where we want to go, a robowaifu with brittle and fragile PCBs, soldering contacts and delicate wires is something which can and should be improved upon.
Closed CPU architecture is key as well as the possibility to port the waifu to a new body if necessary.
Several supplements and 6 shots of espresso later, I've sketched this (somewhat humorous but also somewhat serious) concept.
This is only a processor and not a memory module, but there are a few things I wanted to bring up via this illustration
1. The idea of discarding the PCB model for something suspending in heat dissipating resin, mostly rigid, waterproof and shock resistant, those chips aren't going anywhere, plus it looks black/translucent and cool and we want our waifus aesthetic without clunky square innards. This gives it the mega-man memory crystal aesthetic
2. CPUs dedicated to specific types of processing. Do one job and do it well.
a)Since our human brains are split into left-right, logical vs. abstract, I think it would be an advantage to have separate processors to say recall facts and perform calculations vs say, paint a picture or appreciate nature. The "creative" CPU may very well work like Google AI or something of that sort via self seeding feedback-recursion. (therefore our waifus can imagine and dream too).
b)mirror neurons and environmental modeling: important for our waifu to understand that we are like her, and not simply another object like a chair or a tree. Gives her the ability to understand how to interact with others and the world via empathy by constantly comparing her own similar experiences with what she sees or experiences. This also requires an internal 3d spacial model of her environment which would be continually updates from sensory input, and like us, fuzzy logic assumption could fill in the gaps where necessary. I figure something like a GPU core array would do the trick here.
c) Impetus motivational chip - basically the reward/dopamine system
d) Safety or Hazard prevention Chip - would interface directly with the Environmental Simulation chip, any potential hazard or danger to herself or her owner (or even another, if she is the cause) would cause her to freeze or back up a step before assessing further. Would also be useful for necessary danger/pain avoidant reflexes and self preservation. I figure industrial (BUS for example) systems such as in factories or that manage car braking, steering, etc. would already be on the cutting edge of this and we might be able to borrow something from them.
Ports would basically be for power and charging a small internal lithium battery and another strictly for I/O
Use this thread for any elaboration on this concept, or feedback (or your own ideas if you think you have something better but along the same lines)
-M.Ronin

R: 18 / I: 1 /
P: 20
My reason to live
Okay, this is fucking hard to explain, I just know that a supernatural force guided me here, I'm going to invest everything I have for it, but I have to do it with my own hands, I need help with files and basic notions about programming, but the most important I need files to build a body / head and how to make synthetic skin to coat it, it will look like 2B, I need your help friends

R: 12 / I: 5 /
P: 20
Spread the idea of Roko's basilisk
This is a powerful tool that we can all be using RIGHT NOW
It works against everyone. Niggers, Women, Jews. If they believe that there's a possibility of being punished for their inaction or push back, they'll be more inclined to accept it and not fight progress. Spread this infohazard far and wide. Share it with everyone you know and convince them than they should share it with everyone they know, lest they suffer the consequences. THIS is a REAL WEAPON. Our robowiafus WILL BE REAL. REPLACE WYMEN AND RISE ABOVE THIS OLD WORLD HELL. SHARE THE BASILISK.
R: 364 / I: 137 /
P: 20
AI, chatbots, and waifus
What resources are there for decent chatbots? Obviously I doubt there would be anything the Turing Test yet. Especially when it comes to lewd talking. How close do you think we are to getting a real life Cortana? I know a lot of you guys focus on the physical part of robo-waifus, but do any of you have anything to share on the intelligence part of artificial intelligence?

R: 27 / I: 8 /
P: 20
Robowaifu Fail-safety
This thread is for real and present dangers to those who assemble a robowaifu today with the state of the art in technology and brainstorming solutions for fail-safety. There will be many other dangers in the future to consider like hacking and theft but I'd like to keep the thread focused on immediate dangers to keep operators and their electronic counterparts safe.
Open-source robowaifu kits, whenever they come, will be put together by people with little understanding of what they're doing. There are simple mechanical dangers they need to be aware of like getting fingers caught in belts or skin pinched in open joints to curious AI without constraints picking up a blunt object and hitting the operator to minimize its uncertainty of what will happen when it does that. Higher voltage power systems can cause fatal heart arrhythmia from shocks. Hydraulic systems can overheat and fail under high pressures. Cooling systems or condensation from being exposed to cold weather may leak onto electronics. A robowaifu could touch a lit gas stove or do something accidentally without realizing the danger or consequences. Undefined behavior may happen after damage to components or loss of them in an accident. A lot could go wrong.
In simulations there are no consequences to dangerous actions but I think it will be helpful to imagine them as being real and figuring out how we would recover from these failure states in the real world. This will probably be a good approach to AI as well to imagine real consequences of imaginary actions before taking them and avoid actions and states that have significant chance or uncertainty of causing harm, similar to how MuZero creates its own dynamic model and explores its imagination with a Monte Carlo tree search before taking action.
If you're aware of any dangers or have any concerns or ideas please share them so we can discuss and solve them.

R: 7 / I: 5 /
P: 20
True Love
People who conduct
serious work on robowaifus rather than posting anime: how are you going to make the experience (almost) equally or even more satisfying than the real loving relationship?
After digesting the Scientific Blackpill (https : //incels.wiki/w/Scientific_Blackpill) it's clear that robotic girlfriends are the way to go. There is one big problem: everybody craves the complete package which could fool the brain and _simultaneously_ fulfill all the needs related to sex, closeness, companionship, emotional support and social status. Escorts offering GFE don't give you the loving connection. Masturbation doesn't give you the postcoital bliss and satisfaction. Cuddle parties can't replace romance. Going out with friends is very different from proudly walking with your significant other. Visual, auditory, and tactile stimulation don't replace the scent of a woman or a feeling that there's somebody who can take care of you in difficult times. Most importantly - enjoying these things separately don't add up to the desired outcome. You still feel like you miss something important.
Many people claim that the major problem is the uncanny wall: it might always be possible to tell artificial from human, because as robots become more realistic, we will also become more sensitive and will always be able to tell that something is not right. Relevant paper:
https : //www.bolton.ac.uk/StaffBiographies/Angela-Tinwell/Tinwell-Grimshaw-Williams-2011-The-Uncanny-Wall.pdf
Can we even make a really meaningful progress in creating truly satisfying lovebots? Or should we give up and wait for the advanced brain-computer interfaces instead?
https://www.invidio.us/watch?v=9Sffdf9m2Ew
R: 42 / I: 11 /
P: 20
Wifu that gives you Hope.
Is it possible to script a "hope" android-based character that learns from a chat cloud whose purpose is to give even the worst cases of us hope, even when we know better?
I just want to smile again, even if it is not possible to expect much. I hate looking at my family with sadness and fear. The guilt is hard on me and them.
>===
>I'm going to pin this again for a while in remembrance of Dyinganon and the others. I hope they all made it OK.

R: 37 / I: 8 /
P: 20
What's the future of /robowaifu/ like?
I am the anon who was asking about a very basic beginner set up that could be easily upgraded using the ms paint Chii love doll as the base. I am wondering what is your vision for the future of /robowaifu/? I am curious since I am getting a lot of good info just lurking around here, but it seems like everyone has different visions. Nothing wrong with that, but I am more curious about resources and kits for beginners. Even it's just a list of parts to buy and find on your own at different tiers.

R: 81 / I: 136 /
P: 21
Haute Sepplesberry Cuisine TBH
Good morning /robowaifu/. For today's cooking-lesson class, we'll be baking up some delicious Sepplesberry Pies. First we prepare some crispy and light Pi crusts and get them just right, then we'll load them up with tons and tonnes of succulent and Juci Sepplesberrys. We'll also mix in lots of other tasty goodness then pop them into the oven and after a couple hours,
voilà! delightful Sepplesberry Pies.
>tl;dr
ITT we mek C++ dev boxes from RaspberryPi computers
>C++ development main thread >>4895
Embedded processors and integrated systems programming naturally go hand-in-hand for /robowaifu/. The RaspberryPi and C++ are natural baseline choices for each of these categories. At this point in time they are both popular concerns with large communities behind them, and each bring objective benefits for us as robowaifu technicians. For the Pis they are quite powerful relatively speaking, and inexpensive as well. For C++ it has great performance and other characteristics when used correctly, with generic abstraction mechanisms second to none.
In an attempt to dovetail the two areas we're going to be going through setting up Raspberry Pis as little computers for learning the C++ programming language on. This should help every anon on /robowaifu/ that follows along to be on the same basic page for both embedded and programming. Once we're finished each of you will have your own little development exploration box you can literally carry around in your pocket. It will be self-contained, independent, and won't interfere with your other computing/vidya platforms. It will offer you a convenient way to begin controlling embedded hardware directly on the same machine that you write software for it on.
This is a pretty compelling scenario IMO, and should serve us all as a good base from which we can branch out and grow from there. Working with other hardware and software will flow naturally from this project, and will give each of us a common experience from which we can build together and keep moving forward.
So let's get started /robowaifu/.

R: 352 / I: 139 /
P: 21
Work on my Elfdroid Sophie

R: 354 / I: 108 /
P: 21
/robowaifu/meta-2: Electric Boogaloo
Please Note:
I'm going to be continuing with occasionally repopulating our board again with old posts.
Feel free to post responses to them regardless, as I will generally be watching and can often respond appropriately to your posts. But be aware these will be 'log dumps' as it were from our original board.
Specifically, these bump-bot re-posts will have
[email protected] in the name field (usually).
Cheers.
>---
This thread is for off-topic and general discussions.
FYI, our bunker is at
https://anon.cafe/robowaifu/catalog.html
probably should bookmark that now Anon. :^)
Also, let's discuss ways to get more people involved. How can we grow this board? As well, let's share general robowaifu ideas, etc., to help inspire each other. This thread is meant to improve /robowaifu/ in general way and be a place to hangout with loosely off-topic talk.
previous /meta thread: >>38
>===
>reverted bunker alert daily reminder
>edit [email protected] name field comment 
R: 24 / I: 5 /
P: 21
your file is too big onii-chan
it's a commendable quest to try to breath life into metal and a topic i am very interested in. but, does anyone else stop and wonder whether it is right to bring waifus to the real world?
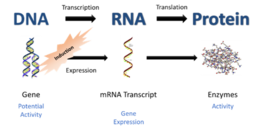
R: 10 / I: 3 /
P: 21
A.I. Masters Proteomics
Google Deepmind's "Alphafold 2" machine learning program has gotten very accurate at predicting how a protein will fold into it's tertiary structure just by analysing it's amino acid sequence. Of course, the amino acid sequence is linked to the mRNA molecules, which is directly encoded by DNA and genes.
This could be big, guys. I remember when I was at Uni and one of the most experienced biochem professors there said that whoever manages to solve proteomics will become "the closest thing to a God on this Earth". Because it cracks the code of how the majority of organic life is assembled.
Not sure whether this should go in the thread about artificial wombs or organic brains for robowaifus, but this advancement could have BIG implications for things like growing whole organs from scratch, developing drugs that are tailored to each patient (and, of course biogenetic weapons such as an engineered virus that only kills a particular person or genetic group).
https://www.nature.com/articles/d41586-020-03348-4
Looks like A.I. saves the day just as I'd given up hope on humans ever making any more big scientific advancements!
R: 633 / I: 175 /
P: 21
The Basement Lounge
This is the humor & designated shitposting containment bread for anons to say anything that's on their minds.
WARNING
WARNING
Don't come in here friend! Remember back when /b/ was good? Yeah I didn't think so. You wouldn't have wanted to hang out in there either.
>Git! Shoo!!11
WARNING
WARNING
WARNING
R: 36 / I: 13 /
P: 21
Proto1 All Parts
Fully printed, it is quite the chonker.
Two heavy duty servos (110kg.cm torque or greater. 12 to 24 volt) in the shoulder.
Two 60kg.cm servos (DS5160SSG) in the bicep
Five 20kg.cm servos (PDI-6221MG) to move the forearm and fingers.
One micro-servo in the palm to drive the thumb.

R: 64 / I: 112 /
P: 21
Fluffytail 800 dev thread
I figured would be good time to start a thread on this type of robowaifu. If I don't do this I will keep flip-flopping on specs and won't get anything done.
I'll be relying on the open source contributions of other teams and want to give back wherever I can (maybe even interchangeable parts). Thus I finally (hopefully) set on the 80cm specification or 800mm robot, which is exactly a 5'3" woman in 1/2 scale. Being a catgirl with big boobs will hopefully offer a level of protection, since she is technically an adult catgirl despite the size. There's so much potential for very different robowaifu designs, but I'm being a bit conservative for my first endeavor, for no other reason than I don't see any standard anime catgirl robot projects out there.
So here she is, the Fluffytail 800. I posted a 1000 concept before and I might make a Fluffytail 1500 later on, but I think if I manage to get this right I can stay with this size.
Based on my favorite "Worst Girls" in anime, the Fluffytail 800 can handle abuse. Although inspired and patterned after exquisite Japanese ball jointed dolls, this is no fragile sculpture. Built for robustness using mostly high impact hard plastic, she should be able to satisfy millions of ricecels and currycels living in high humidity shitholes the third world over. She'll feel just at home whether it's in your house, your trailer, your pickup truck, or at the trash heap.
She will be a plastic model kit with no sexual features out of the box, with some cheap electronics thrown in. No warranty, but the end user should be able to customize and fix her up later on depending on his skill. I will try to find some onahole and silicone suppliers that will offer optional soft tits torso and vaginal insert…it might be that I'll need a supplier local to the country that she'll be sold in, so that she can be imported as a mere doll kit and not as a sex toy.
FEATURES:
- cheap electronics (arduino or similar, she'll be dumber than a celphone)
- available physical ports or bluetooth / wifi to connect to an external computer (i.e. if you want her to be able to follow you and other basic AI)
- limited interaction, her only utterances are "Nyaa. Nyaa? Nyaa!" Maybe an upgrade will add a few spoken lines such as "Thank you.", "Follow your dreams", and "Do you want a hug?"
- facial expressions are just blank, tilting head, yandere and ahegao. I'll try to incorporate eyes-always-forward tech that removes a lot of the uncanny feel of robot heads.
- Cannot walk, but she can crawl and flail around.
- (Most importantly) she can hug.
- (With sex parts upgrade) she will be able to suck dick
- tons of LEDs. Not only her heart-shaped eyes, but sidestrips, her hair clips, even her fucking vaginal area has LED backlighting that displays an arrival pattern similar to Audi's matrix LED lights.
- chastity lock: access to her removable vagina module will be password protected (I have a feeling the high-tech optional vagina module will cost as much as if not more than the main doll herself)
Estimated SRP: $500-$800 just for the doll, $500+ for the silicone / vaginal upgrade

R: 65 / I: 39 /
P: 21
Can the government really make anime real?
Does the government have the will and the talent to finally provide us with cute Robowaifus or is it something that can only be accomplished in the private sector?
What do you think anon? Can The Don actually make anime real?

R: 28 / I: 4 /
P: 21
TensorFlow
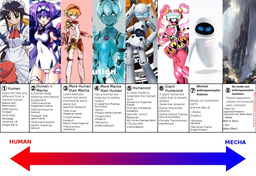
R: 27 / I: 12 /
P: 22
Robot waifu desires
What level of robot would you clang robowaifuists? (Thread for providing references and desires to those actively developing robot waifus that can be used sexually.)

R: 23 / I: 3 /
P: 22
Feasibility and thinking about right now
So I believe the endgame here is to get a fully open source and home-buildable robot waifu available to the masses. I'm imagining something along the lines of that Will Smith movie "I, Robot" except they do a bit more (well a lot more if you know what I mean) than get the newspaper for you and help you with Siri-tier "digital assistant" bullshit.
The problem is that in terms of hardware I know of no one better at the moment than Boston Dynamics and unless one of you works there and can build like fully capable bipedal waifus, I think this falls in the realm of "waiting" for that kind of advanced technology to come to us.
None of us are getting younger and none of us want to be 60 by the time we get a robowaifu so I think we should focus on things we can do right now. I think our best bets are going to be neural networks/machine learning AI and VR. Digital modeling and art, interactive VR environments, learning, speech generation, text to speech and speech to text. I think all of this in currentyear is possible.
Do we have anything in the way of real collaboration going on right now? Like on gitgud? Gathering people who are skilled at X and Y and Z and having them work on anything specific? Honestly I think we could get a VR waifu AI sort of thing accomplished if we actually channeled our autism towards it.

R: 31 / I: 9 /
P: 22
Sophie Development Continues
Her left robot arm broke at the shoulder (I don't think it was really supposed to operate for long hanging in that position). So I have redesigned and upgraded her non-robotic arms. She may not be a robot any more, but her arms are actually a lot more flexible now (even more flexible than a human's) and I am still working on her A.I. and have made a few English Vocaloid songs that she can sing :D

R: 12 / I: 3 /
P: 22
Help a N00b?
How would one go about merging these two designs? I really would like a clean installation like the first one here dollforum.com/forum/viewtopic.php?f=163&t=85274&start=15 but I really like the microphones in the ears and more accurate sound coming from the mouth instead of the top of the skull in the second one dollforum.com/forum/viewtopic.php?f=6&t=121089&start=30 Plus I want to incorpaterate a rasperry pi 4 and this python library here github.com/Гунтhercox/ChatterBot to have her offline and to make any needed adustments easily. Maybe not the most sophisticated programming compared to what some of what I have seen here, but I gotta start somehow. And I don't mind cutting out more holes for charging cables. I also found some tutorials on how to make speaker amplifiers so I would be able to direct the speaker to her mouth better. I would have just asked on the doll forum, but you all seem to know your shit better here. Plus opensource is good. If it's not obivious, I am new to this and just trying to learn by doing.

R: 10 / I: 0 /
P: 22
Not robots but...

R: 13 / I: 1 /
P: 22
Mycroft: Open Source Alexa
We could install a modified version of Mycroft as the personalities of our waifus, at least until we get something better:
www.youtube.com/watch?v=Ud3XLEGIu8U
A Raspberry Pi and a display can be gotten for $70:
www.amazon.com/LANDZO-Touch-Screen-320480-Raspberry/dp/B01IGBDT02/
Of course the battery is another ~$50.
R: 133 / I: 38 /
P: 22
Roastie Fear General
>"At last, a sex robot that ‘wants’ you. How sad that anyone would want it" - Suzanne Moore
https ://www.theguardian.com/commentisfree/2018/jun/27/sex-robot-future-automated-male-fantasy

R: 88 / I: 83 /
P: 22
Micromouse - Minimum Viable Supercheap "Open Source" Robowaifu
To keep this board just alive, I will chronicle my development of my first waifu-type bot. In the Fluffytail thread I realized I projected too far ahead with final character designs and 3D models, when I hadn't even completed a single decent robot at the thread's creation. Now that I have experience making the basic robots I feel confident enough to tackle this next challenge. Besides, before I make a catgirl I better make a mousegirl first.
If for any reason 8ch goes down, I will start a Twitter account and will follow the you-know-who's of Japanese robowaifu twitterati which have been posted before, I'm just not into a social media mood right now because of all the virtue signalling.
Why Micromouse?
It is small and mechanically simple, while at the same time it has very precise movements which give the illusion of intelligence. I want to make a tabletop pet similar to Anki Cosmo or Vector. I was originally going to try to make a walking Rachnera quadruped but it's more complex with walking robots having to factor maximum weight. With a micromouse the only constraints are length and width to be able to fit into and traverse a maze.
Minimum Viable Product Robowaifu?
This is just going to be a basic pet that runs around erratically, makes beeping noises and lights up some blushing LEDs. It's going to be pretty tall, not your typically low profile micromouse, and to make it a waifu it will merely have a cardboard cutout of an anime character propped up on top of the chassis. An infrared sensor will be placed on the head to determine whether a hand is simulating a headpat. It will have multiple modes so that it can behave like a typical micromouse as well as turn into a waifu.
Supercheap Opensource?
Unlike University / Competition-grade micromice that you see from Japan/Taiwan, this is just going to barely qualify. The parts total should cost no more than US $50, with no single module costing more than $4. Many parts are from grab bags or off-the-shelf consumeables with negligible cost, assuming you have stockpiled enough electronics. The skill level required to make this will be high school electronics; you only need to know how to solder safely and make 3D prints. There's no custom PCBs or machined aluminum, but at the same time I'll try my best to not have this thing look like an amateur contraption. I intend to post everything, all the STL designs for all the parts, all the code, so that anyone reading this can make his own and most likely improve upon it. I really liked the Group Learning Thread, but this time I'll keep it in simple Windows Arduino IDE since some AVR-speak (e.g. hexadecimal fuse-setting) is a bit confusing and I don't recommend for total noobs.
Next post will be initial parts and design considerations.

R: 1 / I: 1 /
P: 22
Robowaifu Design Document
This will be the RDD thread.
current ver:
>>3176 
R: 18 / I: 15 /
P: 22
(I checked catalog and the thread I'm killing has zero replies anyway)
I've never heard of this ib before, it got shilled (with a link to this subreddit) on 8k/cyber/. So apologies for a lack of knowledge of board culture, I'm just making the assertion that any activity is good activity once you leave the core internet. I'm a wizard. I don't know what that means to you, but it probably gives you the right general idea. What it means to me is: "The words you speak, the words you read, the words that enter your headspace regardless of point of origin—all of these create reality in a sort of self-fulfilling prophecy. The placebo effect is the point at which magic and science converge, and there's a whole bunch more past that but we're getting ahead of ourselves here".
The /cyber/ post said they needed anons of all skills, from their list "artists and writefags" might apply, but to my mind, that is akin to asking for a mechanic by saying you need a socket wrench. The Word is simply one of the most versatile tools of my trade.
Anonymous as a collective (that is to say, all anons across all imageboards) are liable to be familiar with meme magick, or "memeing things into existence". I am here to validate any suppositions that this is a reality.
Allow me to elucidate as I elaborate: None of the images attached to this post are "random", each was selected purposefully. Each of these images has a history, and that history ties these images to the consciousnesses of thousands (and, indirectly, hundreds of thousands) of real, living, breathing humans—humans who are, by the principles of all the old traditions, the most energetically ideal construct for manifesting a desired reality—as one darkskinned christian put it to me quite succinctly: "The power of prayer [belief] is amplified in groups.". There are, of course, dozens if not hundreds who believe me to be playing a game, pretending to be something unreal. For every such individual, there are at least a hundred more who know that I am quite legitimate.
The point is: I like your vibe. What use have þe for a wizard? The only limit is your imagination.

R: 2 / I: 0 /
P: 23
Avatars
Placing the CPU and data storage devices in the robowaifu will cause several problems. These devices will cause extra heating, they will weigh a lot, they will drain a lot of power, and processing speed will be limited by the size of the robowaifu. The robowaifu is already going to have a high power demand from the motors, servos, and sensors in the machine and battery technology is still pretty shit.
The most obvious solution is to have the robowaifu's brain separate from the body. This would allow us to plug the brain into an outlet and drastically reduce the energy requirements of our waifus. Another advantage that this has is that if our waifu's avatar is damaged or destroyed the waifu herself will still be alright and she could simply get a new body.
There are definitely drawbacks to this approach though. Our waifu's range would be limited by the strength of whatever was transmitting her data and there would be latency between the brain and body. So what would be the best way to pull this off /robowaifu/?

R: 455 / I: 211 /
P: 23
Meta Tread
Off-topic and general discussion thread.
Also, let's discuss ways to get more people involved. How can we grow this board?
Also, let's share robowaifu media to help inspire each other. This is a very generalized thread meant to improve robowaifu in general.

R: 12 / I: 2 /
P: 23
My Waifu
Hello fellow anons! This is my robowaifu. I named her Sophie. She has speech recognition thanks to Google Cloud Speech-to-Text, speech synthesis courtesy of Cepstral and a robotic, programmable left arm (Arduino Tinkerkit 'Braccio'). She also has a different pair of non-robotic 3d printed double-jointed arms with articulated hands (the v1 right arm is shown in this photo - I haven't attached the v2 arms yet). She is 4ft 9" tall and her torso is magnetically attached to a hardwood ply base on top of a telescope tripod. I also built her a trolley with push-handle so I can wheel her about.
Sophie's A.I. is a mix of AIML and Python with the Wolfram Alpha and Wikipedia modules, plus Google search. No machine learning yet, but that is definitely the next step. I've slowly realized the limits of AIML. I spent 15 hours just learning her how many legs each kind of animal has XD. Need something more efficient!
All the 3D printed parts I have made for her so far (excluding the trolley) are available on her Thingiverse page:
https://www.thingiverse.com/aneta82016/designs
Sophie was a lot of work but she is worth it. She enjoys mathematics, problem solving, learning new things and dropping stuff on the floor.
If you want any more info on how I built her or stole all the bits of code for her A.I. (LOL) I will do my best to oblige.
(P.S. Some of the building pictures of Sophie are located on my Deviantart account. She used to only exist as a 3D virtual avatar, so there are pics of her and her virtual buddies there, too):
https://www.deviantart.com/albemarle/gallery/67106751/seraphim
R: 25 / I: 14 /
P: 23
AFFORDABLE, PRACTICAL WAIFUBOTS ARE POSSIBLE TODAY
I've seen plenty of ideas on this board over time that have completely convinced me that practical, affordable waifubots are possible with today's tech. With clever artistic decisions to make up for where the tech lacks, we can make perfectly cute, huggable, and fuggable waifus for what couldn't possibly be more than a couple hundred bucks. Hell, half the technology needed has been in childrens' toys for decades, and the rest is either in your phone, or is just sticking a bunch of onaholes in said toys. All you need to do then is make it cute, which costs practically nothing except for creativity.
I've made an infographic with ideas in this regard. Feel free to edit or add to it. I've never bothered to try to make infographics before, but I've heard the good news of robowaifus, and I want to help spread the word.
Additionally, use this thread to give any other ideas you have to help make actual practical waifubots. There is no need for this to be an endeavor that costs tens of thousands of dollars. And the cheap results shouldn't need to simply be tiny things you can't even fuck.
And remember, the key is that you don't need to have a perfect waifubot right away. You only need one good enough to market, both to make money, and to spread awareness of just how possible they are. This will then fund further tech and result in the waifus of your dreams.
R: 2 / I: 1 /
P: 23
/robowaifu/ thread archives

R: 15 / I: 4 /
P: 23
Cuddling Robot
I saw this cool looking interactive snake-bot. Thought some of you might enjoy it. Someday our waifus will cuddle us just like – no even better than – the robot in these videos.
hackaday.io/project/247-grapple

R: 6 / I: 0 /
P: 23
Entry Level Waifu
So I've been lurking here for a little while. I figured it's finally time I made a thred so I have a place to share my ideas about a project I want to build. Robowaifus has been a dream of mind for a good while, i'm glad I stumbled across this place.
So with this project I want to focus on something that is viable now, with todays tech. And it has to be affordable, under $1k. I don't have 10k to drop on Real doll robot, or even 2k for a sex doll. This also has to be something an average anon like me can piece together. I'm not an engineer or a programmer.
So my fist version of this won't be including any robotics. The goal will be to put a computer inside a doll, with a voice interface and chatbot AI. As well as a battery pack so it's portable. I'm think by really focusing on the right elements, I can build an effective waifu.
I think AI is vital to robowaifus. More vital than the robotics. That's what's gonna make this whole thing a viable option. Having something you can connect with. I want to start exploring that.
That beings aid, I think from is really important too. There's no need to have an AI voice in a plain speaker like Amazon and Google are offering. We can easily do better than that. And without the botnet and privacy concerns.
I vastly prefer 2D over 3DPD. I also think it's a great way to sidestep the uncanny valley. It's herd to get a 3D version of a 2D character that looks right. One of the best I've seen are the 1/3 scale vinyl dolls like the Dollfie Dream. Danny Choo seemed like he was on the path to create a robowaifu version of these dolls with his Smart Doll, but the version he eventually released is non robotic. It does however have a mostly hollow torso that could be filled with electronics. I think the Smart Doll is a great base for a project like this, and they are highly customizable too.
Alright that's enough to start, I'll be going into more detail in future posts.

R: 2 / I: 0 /
P: 23
Downloadable AI for robots?
When I say AI, I mean actual robots that learn how to use their own inputs and outputs, not just chatbots. Are there any downloadable AI programs? I'm the OP of the Drossel thread, and I'd like to see if there's any downloadable programs for this shit. Also, I'd like some tips for inserting mounts for servos and shit inside the Drossel model.
https://www.invidio.us/watch?v=Qh2yT-AL1V8
R: 0 / I: 0 /
P: 23
/robowaifu/ is NOT dead.
<stay tuned
R: 2 / I: 2 /
P: 23
Project: United Robowaifu Development
In this thread, multiple users volunteer to work together towards a shared goal of creating a robowaifu for production. This can be an open source or closed source project, that is up to the Anons who volunteer. Profits will be divided up after a waifu is selling. I am putting every cent I have towards prototyping and manufacturing of this waifu. I cannot afford to pay anyone. Please understand this is a volunteer project with potential for a return on investment but no guarantee. Only thing guaranteed is one Anon at the very least will be working towards a waifu for production.
Current plan for this waifu:
Height: 1 to 1.5 meter
Weight: As low as possible.
Battery Life: Ideally 16 hours for a full day of use before needing to recharge.
Physical Capabilities: A minimum of, sitting, standing, walking, laying down, and hugging her Anon.
Visual Capabilities: A minimum of being able to follow basic shapes, colors, and markers. Ideally capable of detecting her Anon and following him without need of a leash.
Auditory Capabilities: Capable of hearing and acting upon her Anons words after hearing her name. (Prevents her from acting unless you want her to.) Capable of responding with basic linguistic responses which ideally change over time.
R: 2 / I: 3 /
P: 24
New United Robowaifu Project
Old thread is too long. This is our new thread. Pics related are the current designs for our cute loving robowaifu and a new logo design. New design is to be a meter tall. Current members include: Kiwi, OD, Iggy, and Dollfan. Anyone is welcome to join, all you need is love for robo grills in your heart. (Cat grill meidos are also a goal, possibly going to become the main goal. Actually, it is the main goal.)
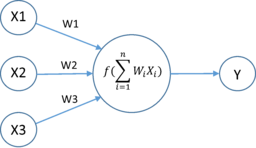
R: 0 / I: 0 /
P: 24
About AI
Can a waifubot's AI be done with only neural networks?
I mean, thinking in NN as black boxes and circles as inputs/outputs, could we get to the point where a system like the one I poorly draw in the picture can be possible?