>>18303
>~145cm
It doesn't need to, since this one won't be sex-enabled, while also having boobs like an adult. I guess even smaller versions would be possible, but I guess with smaller servos then. Anyways, the current plan is to make her with hips around 20cm. For a bigger variant, I'd need a bigger printer or make at least one more cut. Her body below the belt is going to be just a kind of dress-like enclosure which ends around the knees, which makes her shorter anyways. The design is mean to be on a chair or desktop.
I can put a bra on her, as soon as she has nipples, if you're concerned. Gonna be fun buying such a small bra in a local store as an adult male (Chobits comes to mind...)
>>18328
It's a NEMA 17, yes. I'm not going to make my own bracket or such out of aluminum, let alone for the reason everyone copying the design would need to do the same.
I didn't see a bracket when buying it, and had the idea to print it in mind. But I just need to hold it somehow, not an enclosure. These stell brackets are for shelfs and cheeply available everywhere. I don't need to alter them at all. The brackets will hopefully hold the servo while they will rely on some printed parts. The metal parts are mostly about preventing the plastic from getting heated up.
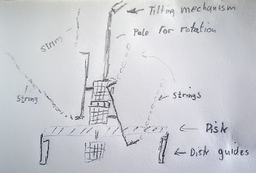
>Do you have a sketch or a CAD mock-up or anything to illustrate?
I made one after you asked (picrel), and yeah I know it looks wild.